Energiearme Funkkommunikation mit Ambient Backscattering
Funkkommunikation ohne eigenen Sender
Ambient Backscattering ist eine besonders energiearme Form der Funkkommunikation für IoT-Systeme. Anstatt selbst ein Hochfrequenzsignal zu erzeugen, nutzt ein Backscattering-Modulator vorhandene Funkquellen wie WLAN oder Bluetooth und überträgt Daten durch gezielte Änderung der Antennenimpedanz. In diesem Artikel werden das physikalische Funktionsprinzip, der praktische Laboraufbau, das PCB-Design, die Signalverarbeitung mit SDR und Matched Filter sowie reale Messergebnisse zur Bitfehlerrate, Reichweite und minimalen Impedanzänderung beschrieben.
Was dieser Artikel zeigt
- wie Ambient Backscattering ohne eigenen Sender funktioniert
- wie ein Backscattering-Modulator mit Antenne praktisch aufgebaut wird
- welche Rolle RF-Switch, SDR und Matched Filter spielen
- wie sich Bitfehlerrate, Reichweite und Energieverbrauch verhalten
Einleitung
Viele moderne IoT-Geräte müssen über lange Zeit mit minimalem Energieverbrauch arbeiten. Besonders bei batteriebetriebenen Sensoren ist ein Batteriewechsel oft schwierig oder gar unmöglich.
Ein grosser Teil des Energieverbrauchs entsteht beim Senden von Funksignalen, da klassische Funkmodule selbst ein Hochfrequenzsignal erzeugen müssen.
Eine alternative Technologie ist Ambient Backscattering. Dabei erzeugt das Gerät kein eigenes Funksignal, sondern nutzt bereits vorhandene Funkwellen aus der Umgebung – zum Beispiel WLAN oder Bluetooth.
Das System überträgt Daten, indem es die Impedanz seiner Antenne verändert und dadurch das reflektierte Signal moduliert.
Der entscheidende Vorteil:
Die Energie wird nicht für das Senden eines eigenen Signals benötigt,
sondern nur für die Umschaltung der Antenne.
Dadurch lassen sich ultra-energiearme Kommunikationssysteme realisieren – ideal für IoT-Anwendungen mit sehr langer Laufzeit.
Funktionsprinzip von Ambient Backscattering
Beim Ambient Backscattering wird kein eigenes Hochfrequenzsignal erzeugt. Stattdessen nutzt das System bereits vorhandene Funkwellen aus der Umgebung und verändert gezielt deren Reflexion.
Das Grundprinzip funktioniert vereinfacht wie folgt:
- Eine externe Quelle, zum Beispiel ein WLAN-Router, sendet ein RF-Signal.
- Das Backscatter-Gerät verändert die Impedanz seiner Antenne.
- Dadurch ändert sich, wie stark das ankommende Signal reflektiert wird.
- Ein Empfänger misst diese Änderung und rekonstruiert daraus die übertragenen Daten.
Die beiden Impedanzzustände der Antenne entsprechen dabei typischerweise den Bitwerten 0 und 1. Die Information wird also nicht durch einen aktiven Sender, sondern durch das Umschalten der Antenne übertragen.
Physikalisch entsteht dabei eine Interferenz zwischen dem direkten Signal der externen Quelle und dem reflektierten Signal des Backscatter-Tags. Je nach Impedanzzustand der Antenne verstärkt oder schwächt sich das empfangene Signal.
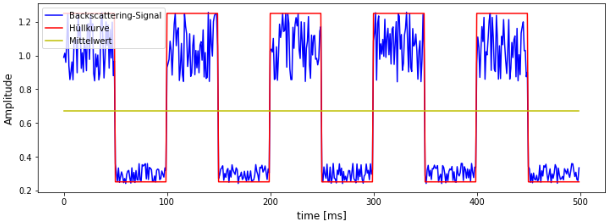
Dadurch verändert sich die Amplitude beziehungsweise die Hüllkurve des Empfangssignals leicht. Diese Änderung kann von einem Empfänger ausgewertet werden, um zwischen den beiden Zuständen und damit zwischen Bit 0 und Bit 1 zu unterscheiden.
Eine einfache Auswertung ist über einen Schwellwert möglich: Liegt die gemessene Signalhüllkurve über einem definierten Mittelwert, kann dies zum Beispiel als Bit 1 interpretiert werden. Liegt sie darunter, wird Bit 0 erkannt.
Ambient Backscattering ermöglicht damit eine besonders energiearme Funkkommunikation, da nur die Antennenimpedanz umgeschaltet werden muss und kein eigener HF-Sender erforderlich ist.
Systemdesign und technische Entscheidungen
Für die Entwicklung des Backscattering-Systems wurde das Gesamtsystem in einzelne technische Teilprobleme zerlegt und für jedes Teilproblem eine geeignete Lösung gewählt. Dadurch konnte eine praxisnahe und gleichzeitig effiziente Systemarchitektur entwickelt werden.
Wichtige Designparameter waren dabei:
- Antennentyp
- Modulator-Schaltung
- Modulationsverfahren
- Empfangssystem
- Frequenzbereich
Antenne
Für den Laboraufbau wurde eine einfache λ/4-Monopolantenne gewählt, da sie leicht zu realisieren ist und gute Ergebnisse für erste Experimente liefert. Für ein optimiertes System wäre eine grössere Antennenstruktur sinnvoll, um die reflektierte Leistung zu erhöhen.
Empfänger
Als Empfänger wurde ein Software Defined Radio (SDR) eingesetzt. Der Vorteil liegt darin, dass Filter, Demodulation und Signalverarbeitung flexibel in Software angepasst werden können, ohne die Hardware zu verändern.
Modulator
Zur Umschaltung der Antennenimpedanz wurde im Laboraufbau ein MOSFET verwendet, da er energiearm ist und schnell schalten kann.
Für höhere Frequenzen – insbesondere im WLAN-Bereich – sind RF-Switches besser geeignet, da sie speziell für HF-Anwendungen optimiert sind und weniger parasitäre Effekte aufweisen.
Modulation
Im ersten Schritt wurde Amplitude Shift Keying (ASK) verwendet, da dieses Verfahren einfach umzusetzen ist und sich gut für experimentelle Aufbauten eignet.
Für robustere Systeme sind Verfahren wie Frequency Shift Keying (FSK) vorteilhaft, da sie eine bessere Störfestigkeit bieten und die Bitfehlerrate reduzieren können.
Frequenzwahl
Für die Experimente wurde das 2.4-GHz-Band genutzt, da es durch WLAN und Bluetooth praktisch überall verfügbar ist.
Die Umschaltfrequenz des Backscatter-Modulators liegt deutlich unterhalb dieser Trägerfrequenz, typischerweise im kHz- bis MHz-Bereich, sodass die Signaländerungen vom Empfänger zuverlässig detektiert werden können.
Laboraufbau für die 1-Bit-Übertragung
Für den ersten praktischen Nachweis wurde ein einfacher Laboraufbau entwickelt, mit dem ein einzelnes Bit über Ambient Backscattering übertragen werden kann.
Der Aufbau besteht aus:
- Mikrocontroller (TinyK22)
- MOSFET (2N7000)
- λ/4-Monopolantenne (Draht)
Der Mikrocontroller steuert den MOSFET, welcher die Antenne periodisch auf GND schaltet. Dadurch wird die Antennenimpedanz verändert und das reflektierte RF-Signal moduliert.
Sender
Der Mikrocontroller schaltet einen GPIO-Pin periodisch zwischen logisch 0 und 1. Dadurch wird der MOSFET ein- und ausgeschaltet.
Die Umschaltfrequenz wird über eine einfache Delay-Schleife eingestellt. Durch Variation der Frequenz kann untersucht werden, bei welchen Bedingungen das Backscattering-Signal am besten detektiert werden kann.
Antenne
Als Antenne wird eine λ/4-Monopolantenne verwendet. Bei einer Frequenz von 2.4 GHz ergibt sich eine Länge von ungefähr 3 cm.
Die Antenne arbeitet zusammen mit der Groundplane als virtueller Dipol. Durch das Umschalten der Impedanz wird das Reflexionsverhalten der Antenne gezielt verändert.
Empfang mit SDR und einfache Auswertung (Labor)
Das empfangene Signal wird mit einem Software Defined Radio (SDR) aufgenommen und in Software ausgewertet.
Die Signalverarbeitung erfolgt in mehreren Schritten:
- Betragsbildung des Signals (Envelope Detection)
- Berechnung des Mittelwerts
- Vergleich der Hüllkurve mit dem Mittelwert
- Erkennung von Zustandsänderungen (Bitwechsel)
Da die Reflexion je nach Position zu konstruktiver oder destruktiver Interferenz führt, kann die Polarität der Bits nicht direkt bestimmt werden.
Deshalb wird eine Präambel verwendet, um die Zuordnung von Signalzustand zu Bitwert (0 oder 1) zu kalibrieren.
Warum Software Defined Radio?
Ein SDR ersetzt klassische analoge Empfängerschaltungen durch digitale Signalverarbeitung. Funktionen wie Filterung, Demodulation und Auswertung werden vollständig in Software umgesetzt.
Dadurch ist das System extrem flexibel und kann einfach an verschiedene Frequenzen, Modulationsarten und Experimente angepasst werden.
Physikalisches Modell und Hypothesen
Zur Analyse des Backscattering-Systems werden die physikalischen Zusammenhänge mathematisch beschrieben und daraus vier zentrale Hypothesen für den Versuchsaufbau abgeleitet.
Hypothese 1: Signaländerung durch Interferenz
Das empfangene Signal ergibt sich aus der Überlagerung eines direkten Pfades und eines reflektierten Pfades:
s(t) = a₁ · ejω(t−τ₁) + a₂ · ejω(t−τ₂)
Dabei sind a₁ und a₂ die Verstärkungen der beiden Signalpfade und τ₁, τ₂ die Laufzeiten.
Die Phasenverschiebung ergibt sich über die Weglängen ℓ:
φ = 2π · ℓ / λ
Je nach Phasendifferenz kommt es zu konstruktiver oder destruktiver Interferenz:
- konstruktiv: φ ≈ 0 → Signalverstärkung
- destruktiv: φ ≈ π → Signalschwächung
Durch das Umschalten der Antennenimpedanz wird a₂ verändert, wodurch sich die Gesamtamplitude des Signals modulieren lässt.
Hypothese 2: Abhängigkeit von der Position
Die Laufzeiten τ₁ und τ₂ hängen direkt von den Weglängen ℓ₁ und ℓ₂ ab:
τ = ℓ / c
Daraus ergibt sich für die Phasenverschiebung:
φ = 2π · (ℓ₂ − ℓ₁) / λ
Bereits eine Positionsänderung von:
Δℓ = λ / 2
führt zu einer Phasenänderung von π und damit zu einem Wechsel zwischen konstruktiver und destruktiver Interferenz.
Dadurch ist die Zuordnung von Signaländerung zu Bitwert (0 oder 1) positionsabhängig und muss über eine Präambel bestimmt werden.
Hypothese 3: Einfluss der Antenne und Reflexion
Die reflektierte Signalstärke hängt von der Leistung an der Antenne ab:
P ∝ A · E²
wobei A die effektive Antennenfläche und E die elektrische Feldstärke ist.
Zusätzlich bestimmt der Reflexionskoeffizient Γ die Stärke der Reflexion:
Γ = (ZL − Z0) / (ZL + Z0)
Eine grössere Impedanzänderung ΔZ führt zu einem grösseren Betrag von |Γ| und damit zu einer stärkeren Modulation des reflektierten Signals.
Hypothese 4: Detektion über Hüllkurve
Das empfangene Signal wird zur Detektion in seine Hüllkurve überführt:
senv(t) = |s(t)|
Anschliessend wird ein Mittelwert gebildet:
μ = (1/N) · Σ senv(t)
Die Bitentscheidung erfolgt über einen Schwellwertvergleich:
senv(t) > μ → Bit = 1
senv(t) < μ → Bit = 0
Ein Zustandswechsel wird erkannt, wenn die Hüllkurve den Mittelwert periodisch durchschreitet. Die Detektion hängt dabei von der gewählten Umschaltfrequenz und der Abtastrate des Systems ab.
Diese vier Hypothesen bilden die Grundlage für die experimentelle Validierung des Backscattering-Systems.
Minimale Impedanzänderung
Eine zentrale Fragestellung beim Backscattering ist, wie gross die Impedanzänderung sein muss, damit die resultierende Reflexion am Empfänger noch detektiert werden kann.
Die Aufteilung der Energie in absorbierten und reflektierten Anteil wird durch den Reflexionskoeffizienten beschrieben:
Γ = (Zant − Z0) / (Zant + Z0)
Dabei ist Z0 die Systemimpedanz (typisch 50 Ω) und Zant die Antennenimpedanz.
Für spezielle Fälle ergibt sich:
- Zant = Z0 → Γ = 0 → vollständige Anpassung (keine Reflexion)
- Zant → 0 Ω → Γ → −1 → vollständige Reflexion
- Zant → ∞ → Γ → +1 → vollständige Reflexion
Für maximale Modulation im Backscattering müssen zwei Zustände erzeugt werden:
- ein Zustand mit möglichst geringer Reflexion (angepasst)
- ein Zustand mit möglichst hoher Reflexion
Einfluss der Impedanzänderung
In der Praxis wird die Antennenimpedanz über ein Anpassungsnetzwerk verändert:
Zant = Z0 + Zanp
Die Stärke der Modulation hängt somit direkt von der Änderung von Zanp ab.
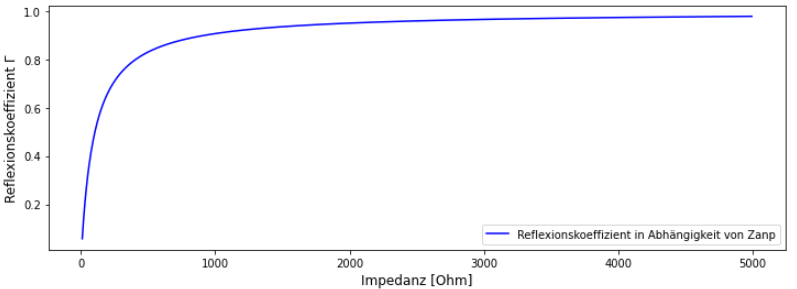
Der Betrag des Reflexionskoeffizienten ergibt sich zu:
|Γ| = |(Zant − Z0) / (Zant + Z0)|
Mit steigender Impedanzänderung nimmt |Γ| zu, jedoch mit abnehmendem Zugewinn.
Praktisches Ergebnis
Messungen zeigen, dass bereits bei einer Impedanz von etwa 1000 Ω ein Reflexionskoeffizient von:
|Γ| ≈ 0.9
erreicht wird.
Eine weitere Erhöhung der Impedanz führt nur noch zu einer geringen Verbesserung, da sich der Reflexionskoeffizient asymptotisch dem Wert 1 annähert.
Schlussfolgerung
Die minimale notwendige Impedanzänderung hängt davon ab, welcher Reflexionsunterschied für eine sichere Detektion erforderlich ist.
Die Ergebnisse zeigen, dass bereits moderate Impedanzänderungen einen grossen Teil der maximal möglichen Reflexion erreichen. Dadurch kann der Backscattering-Modulator effizient und mit geringem Aufwand realisiert werden.
Die experimentelle Verifikation dieser Erkenntnisse erfolgt im weiteren Verlauf mit dem aufgebauten Backscattering-System.
Versuchsaufbau und experimentelle Ergebnisse
Zur Überprüfung der Hypothesen wurde ein Versuchsaufbau für die 1-Bit-Übertragung realisiert und schrittweise optimiert.
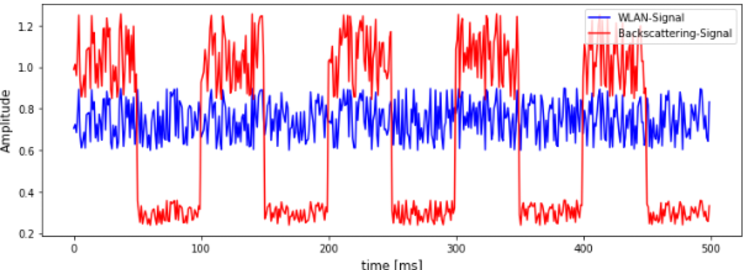
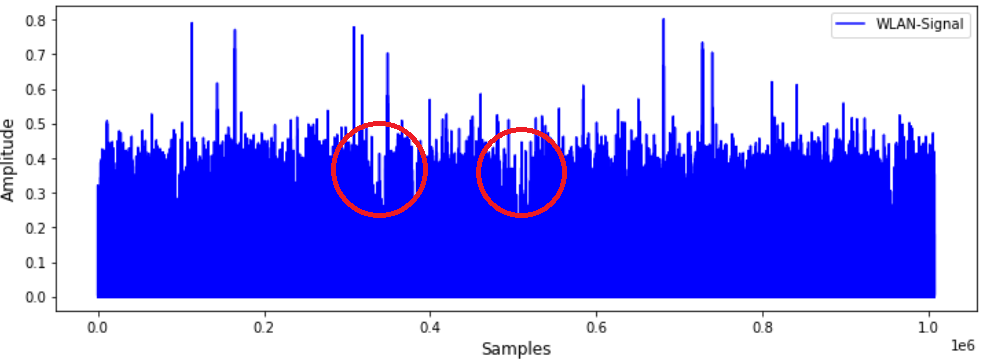
Problem: Instabiles WLAN-Signal
Im ersten Versuch wurde ein WLAN-Signal als externe Quelle verwendet. Dabei zeigte sich, dass das Signal starke Fluktuationen aufweist und nicht kontinuierlich sendet.
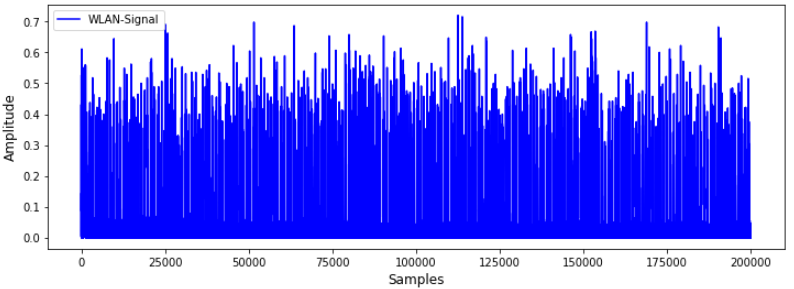
Dadurch überlagern sich die natürlichen Schwankungen des WLAN-Signals mit dem Backscattering-Effekt, sodass die Umschaltpunkte nicht eindeutig detektiert werden können.
Referenzversuch mit konstantem Signal
Um dieses Problem zu umgehen, wurde ein konstantes Trägersignal mittels Software Defined Radio erzeugt.
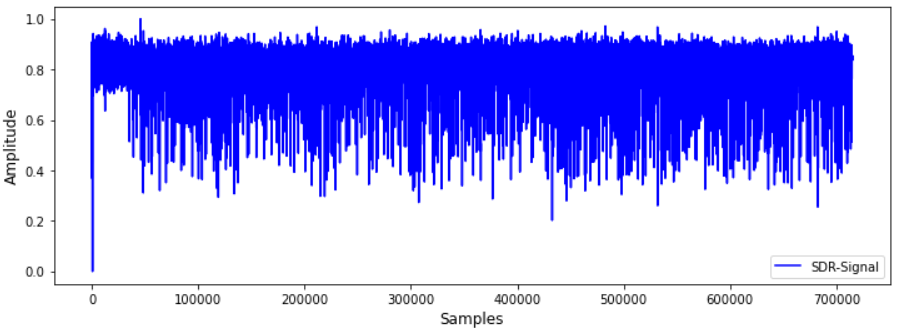
Dadurch konnte der Backscattering-Effekt erstmals klar sichtbar gemacht werden.
- Schaltvorgänge führen zu messbaren Amplitudenänderungen
- Die Änderungen sind deutlich vom Grundsignal unterscheidbar
Einfluss der Hardware
Für die Umschaltung der Antennenimpedanz wurden zwei Varianten getestet:
- Taster: klare und reproduzierbare Signaländerungen
- MOSFET: geringere Amplitudenunterschiede und instabilere Umschaltung
Der MOSFET zeigt bei hohen Frequenzen kapazitives Verhalten, wodurch das Signal auch im ausgeschalteten Zustand teilweise durchgeleitet wird.
Einfluss der Antenne und Position
Die Experimente zeigen einen starken Einfluss der Geometrie:
- Grössere Antennen führen zu stärkeren Reflexionen
- Eine Groundplane verbessert die Signalstärke deutlich
- Die Position der Antenne beeinflusst die Interferenz massiv
Je nach Position entsteht konstruktive oder destruktive Interferenz, wodurch sich die Amplitude des Signals verändert.
Ergebnisse
Unter kontrollierten Laborbedingungen konnte gezeigt werden, dass:
- Backscattering eine messbare Signalmodulation erzeugt
- die Hypothesen zur Interferenz und Antennenwirkung bestätigt werden
- die Detektion stark von Signalstabilität und Hardware abhängt
Schlussfolgerung
Der Einsatz eines WLAN-Signals als Träger ist aufgrund der starken Fluktuationen nur eingeschränkt geeignet.
Für eine zuverlässige Detektion sind notwendig:
- ein möglichst konstantes Trägersignal
- eine stabile Umschaltung der Antennenimpedanz
- eine optimierte Signalverarbeitung (z. B. Matched Filter)
Für den weiteren Aufbau wird daher ein RF-Switch anstelle eines MOSFET verwendet, um ein sauberes und reproduzierbares Umschaltsignal zu erzeugen.
Vom Labor zur Antenne: Patch-Design und HF-Simulation
Basierend auf den Erkenntnissen aus den Laborversuchen wurde der Backscattering-Modulator weiterentwickelt und als Leiterplatte umgesetzt.
Ziel war es, die Reflexion zu maximieren und gleichzeitig eine stabile und reproduzierbare Signalmodulation zu erreichen.
Antenne
Während im Laboraufbau eine einfache Monopolantenne verwendet wurde, wird im finalen Design eine Patch-Array-Antenne eingesetzt.
Diese bietet eine grössere effektive Fläche und damit eine stärkere Rückstreuung des Signals.
Die Antenne wurde im Bereich von 2.4 GHz optimiert, um das WLAN-Band effizient zu nutzen.
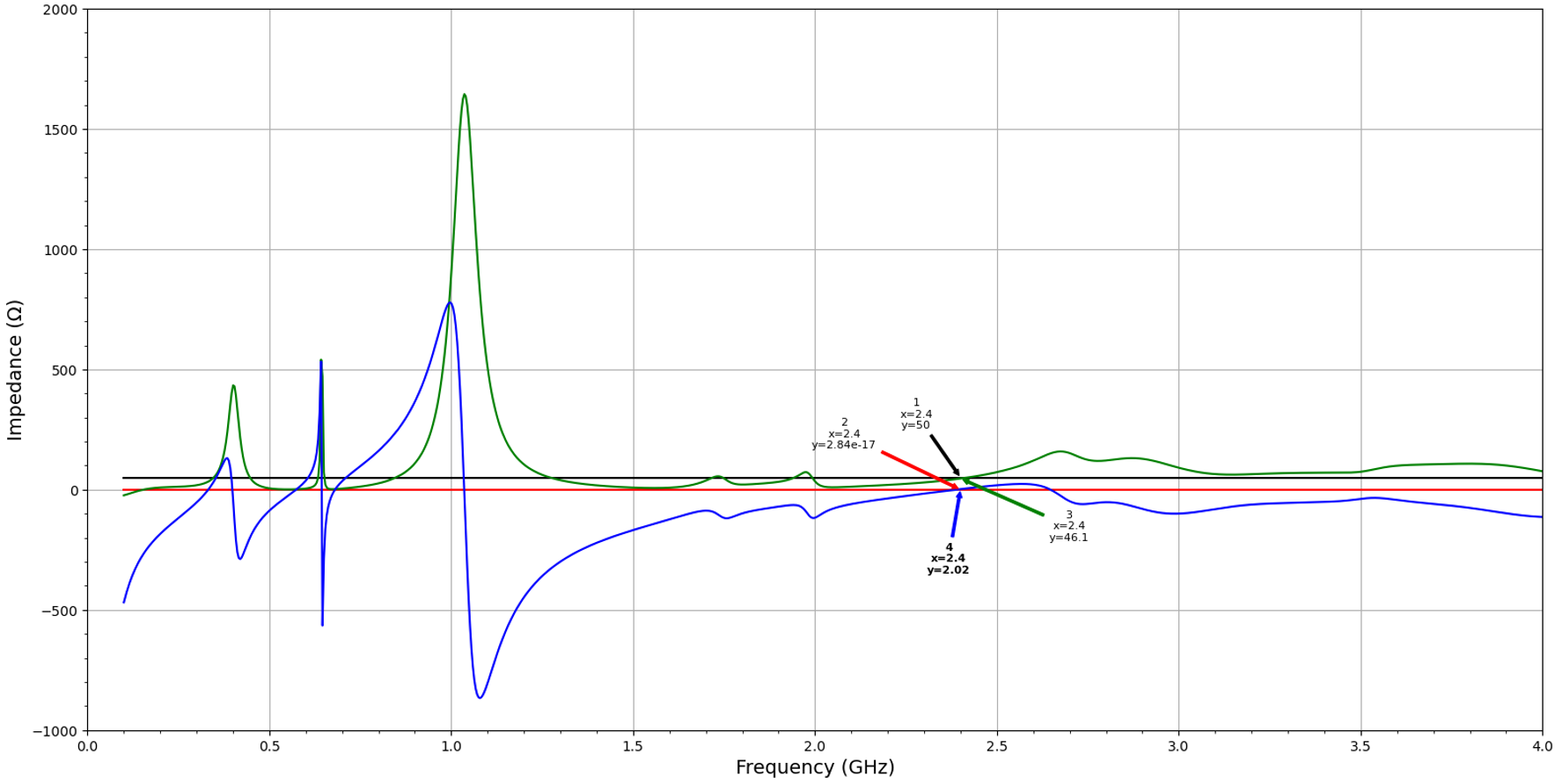
Anpassung und Reflexion
Für eine effiziente Signalübertragung ist die Anpassung der Antenne entscheidend. Ziel ist eine Impedanz nahe dem Systemwert:
Z ≈ 50 Ω
Die simulierte Antennenimpedanz beträgt:
Z = 46.1 + j2.02 Ω
Damit ist eine gute Anpassung gegeben und Verluste werden minimiert.
Die Qualität der Anpassung kann über den Reflexionsfaktor beziehungsweise den S-Parameter beschrieben werden:
S11 = 20 · log10(|Γ|)
Für die entwickelte Antenne ergibt sich:
- bei 2.4 GHz: S11 < −26 dB
- bei 2.5 GHz: S11 ≈ −12.6 dB
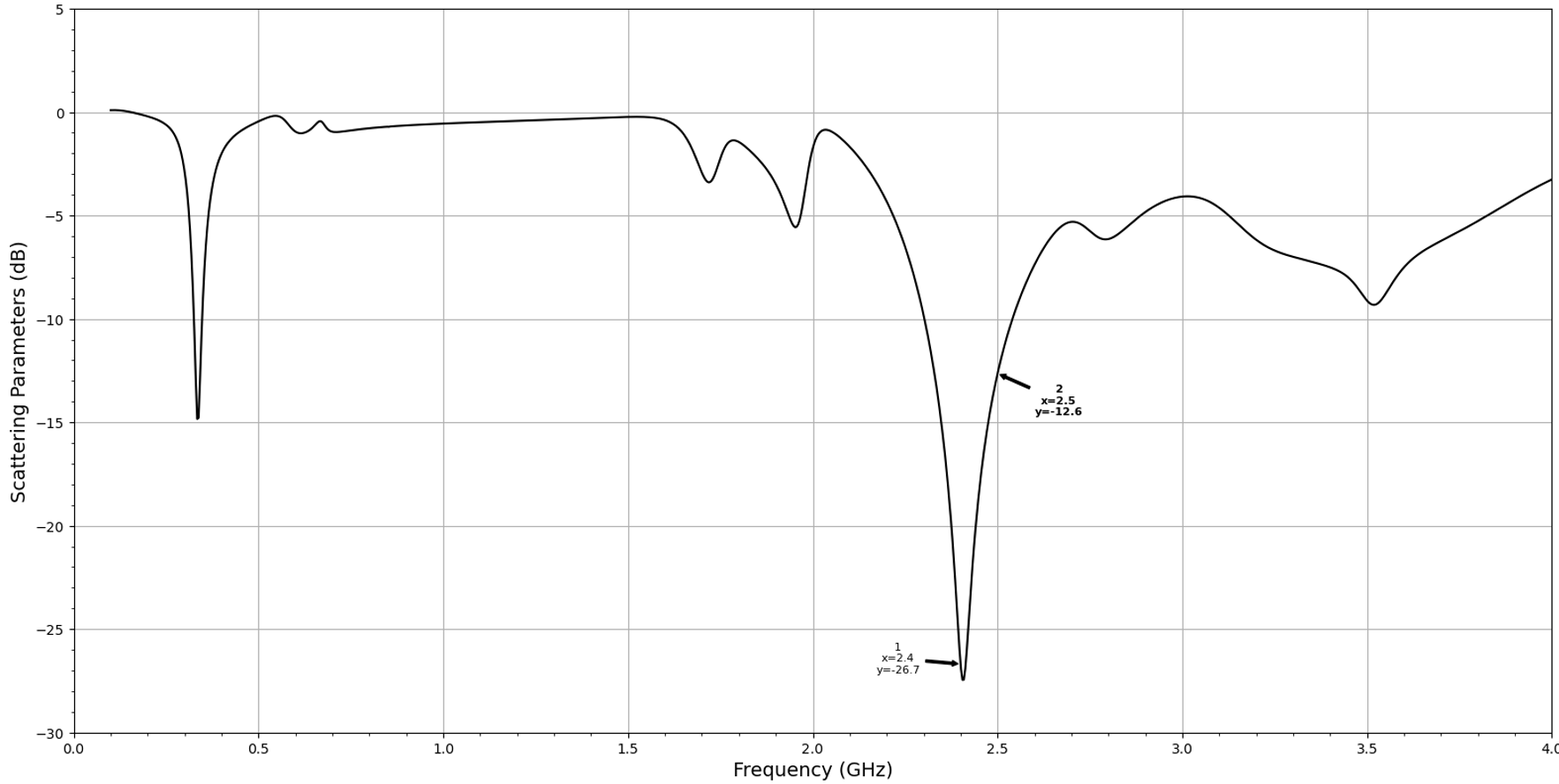
Damit wird das gesamte WLAN-Frequenzband zuverlässig abgedeckt.
Bedeutung für Backscattering
Ein niedriger S11-Wert bedeutet eine gute Anpassung und geringe Reflexion im Grundzustand.
Durch gezielte Änderung der Antennenimpedanz im Modulator kann der Reflexionskoeffizient Γ stark verändert werden:
Γ = (ZL − Z0) / (ZL + Z0)
Dadurch entsteht ein deutlicher Unterschied zwischen den beiden Schaltzuständen, welcher für die Datenübertragung genutzt wird.
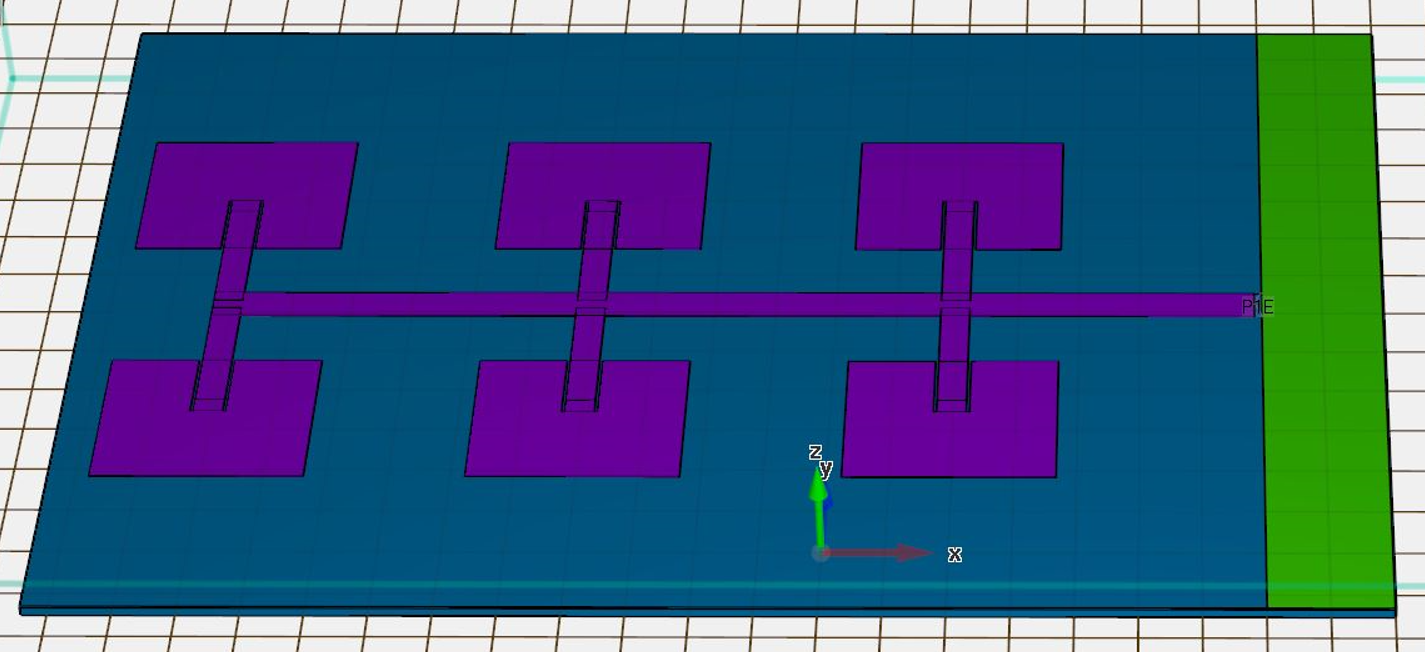
Integration in die Leiterplatte
Die Antennenstruktur wurde als Kupfergeometrie in die Leiterplatte integriert. Dadurch entsteht ein kompaktes System ohne externe Antenne.
Das Design ermöglicht eine reproduzierbare Geometrie und damit stabile elektrische Eigenschaften im Vergleich zum Drahtaufbau.
Modulator-Hardware: RF-Switch, Versorgung und Leiterplatte
Basierend auf den Erkenntnissen aus den Laborversuchen wurde der Modulator weiterentwickelt und als integrierte Leiterplatte umgesetzt.
Modulator-Design
Der im Labor verwendete MOSFET wurde durch einen RF-Switch (ADG902) ersetzt.
Der RF-Switch ist speziell für Hochfrequenzanwendungen ausgelegt und bietet:
- geringere parasitäre Effekte
- saubere Trennung im ausgeschalteten Zustand
- konstantere Impedanzumschaltung
Dadurch entsteht ein deutlich grösserer und stabilerer Unterschied im Reflexionsverhalten der Antenne.
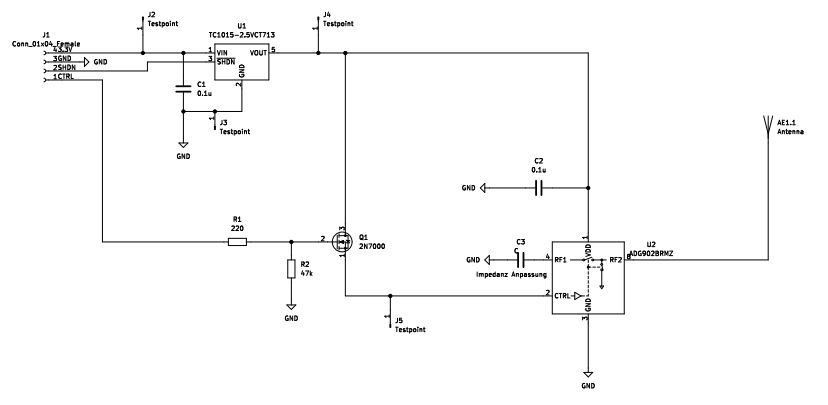
Spannungsanpassung
Der Mikrocontroller arbeitet mit 3.3 V, während der RF-Switch für niedrigere Spannungen ausgelegt ist. Daher wird ein Spannungswandler eingesetzt:
- Ausgangsspannung: ca. 2.75 V
- Typ: TC1015
Der Wandler verfügt über einen Shutdown-Eingang, wodurch der Energieverbrauch im Ruhezustand minimiert werden kann.
Für energieoptimierte IoT-Systeme sollte eine solche Spannungsanpassung idealerweise vermieden werden, da sie zusätzliche Verluste verursacht.
Variable Impedanzanpassung
Zur Untersuchung der minimal notwendigen Impedanzänderung wurde ein externer Anschluss integriert, über den die Anpassung variiert werden kann.
Dadurch lässt sich der Zusammenhang zwischen Impedanzänderung und detektierbarem Signal direkt experimentell untersuchen.
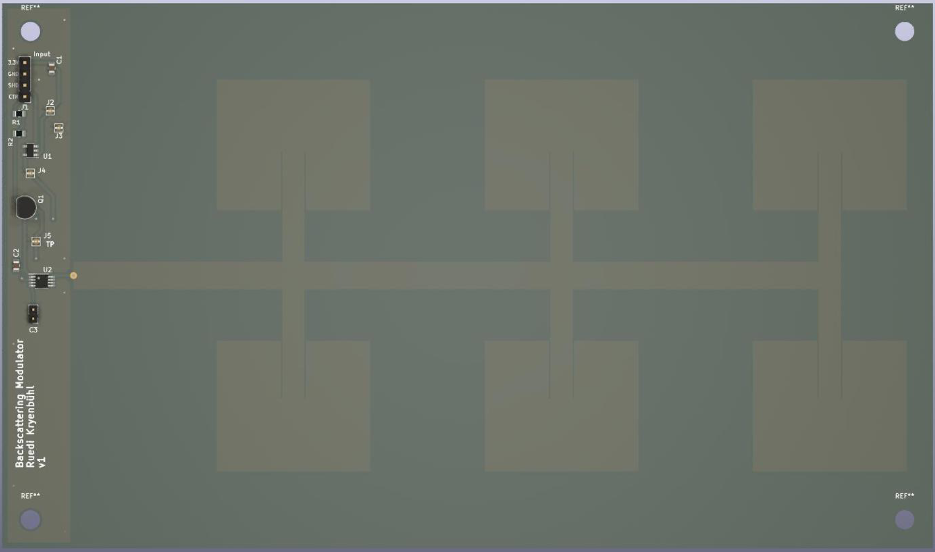
Leiterplatten-Design
Das komplette System wurde als Leiterplatte umgesetzt.
- linke Seite: Modulator-Schaltung
- rechte Seite: integrierte Patch-Antenne
Die Integration der Antenne in die Leiterplatte sorgt für:
- definierte Geometrie
- reproduzierbare elektrische Eigenschaften
- kompakte Bauform
Technische Verbesserung gegenüber dem Laboraufbau
Durch den Einsatz eines RF-Switches und einer integrierten Antenne konnten die zentralen Schwächen des Laboraufbaus behoben werden:
- stabilere Impedanzumschaltung
- grössere Amplitudenunterschiede
- bessere Reproduzierbarkeit
Damit bildet die Leiterplatte die Grundlage für die zuverlässige Datenübertragung mittels Ambient Backscattering.
Empfängeralgorithmus: Präambel, Matched Filter und Bitentscheidung
Für die Detektion der Backscattering-Daten wird das empfangene Signal digital verarbeitet und schrittweise ausgewertet.
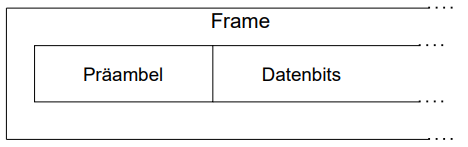
Frame-Erkennung und Präambel
Um den Start eines Datenpakets zu erkennen, wird dem Signal eine Präambel mit bekanntem Bitmuster vorangestellt:
P = [0, 1, 1, 1, 0, 1, 0, 1]
Das empfangene Signal wird mit dieser Präambel korreliert:
R(τ) = Σ s(t) · p(t − τ)
Ein Maximum der Korrelation zeigt die Position der Präambel an und ermöglicht die Synchronisation auf das Datenframe.
Signalaufbereitung
Das empfangene Signal enthält starke Schwankungen, insbesondere bei Verwendung von WLAN als Trägersignal.
Zur Verbesserung der Detektion wurden verschiedene Filter untersucht:
- Moving Average Filter
- Tiefpassfilter
- Matched Filter
Der Matched Filter liefert die besten Ergebnisse, da er das Signal optimal auf die erwartete Impulsform abstimmt:
y(t) = s(t) * h(t)
wobei h(t) die gespiegelte und zeitinvertierte Referenzform darstellt.
Dadurch wird der Signal-Rausch-Abstand verbessert und die Amplitudenunterschiede zwischen den Bits werden verstärkt.
Bit-Detektion
Die Daten werden mittels Amplitude Shift Keying (ASK) übertragen.
Zur Detektion wird die Hüllkurve des Signals berechnet:
senv(t) = |s(t)|
Anstatt einzelne Samples zu vergleichen, wird über die gesamte Bitdauer gemittelt:
μbit = (1/N) · Σ senv(t)
Die Entscheidung erfolgt durch Vergleich mit dem globalen Mittelwert:
μbit > μ → Bit = 1
μbit < μ → Bit = 0
Diese Mittelung reduziert die Empfindlichkeit gegenüber kurzfristigen Signalfluktuationen und verbessert die Bitfehlerrate deutlich.
Synchronisation
Für eine korrekte Detektion ist eine präzise zeitliche Synchronisation notwendig.
Aufgrund kleiner Frequenzabweichungen zwischen Sender und Empfänger kann es zu Drift im Abtastzeitpunkt kommen.
Zur Korrektur wird eine Early-Late-Gate Synchronisation verwendet.
Dabei werden zwei Abtastwerte verglichen:
- ein früher Wert (early)
- ein später Wert (late)
Die Differenz dieser Werte ergibt ein Fehlersignal:
e = s(t + Δ) − s(t − Δ)
Ist e ≠ 0, wird der Abtastzeitpunkt entsprechend angepasst.
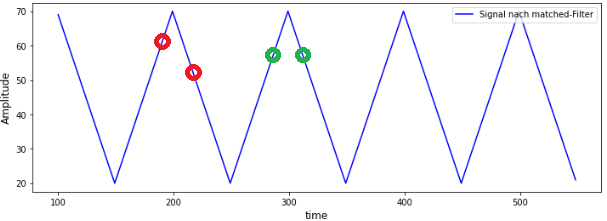
Nach der Matched-Filterung ergibt sich ein annähernd dreieckförmiges Signal, wodurch sich Abweichungen vom optimalen Abtastzeitpunkt gut erkennen lassen.
Zusammenfassung
Die Kombination aus:
- Matched Filter
- Präambel-Korrelation
- Mittelwert-basierter Bitentscheidung
- Early-Late Synchronisation
ermöglicht eine robuste Detektion von Backscattering-Signalen trotz geringer Amplitudenänderungen und starkem Rauschen.
Messergebnisse: Oszillogramme, Frame-Übertragung und WLAN-Träger
Zur Verifikation des entwickelten Backscattering-Modulators wurden mehrere Messreihen durchgeführt und die Signalverarbeitungskette vollständig getestet. Die Versuche wurden mit einem Abstand von einem Meter zwischen Empfänger und Sender durchgeführt.
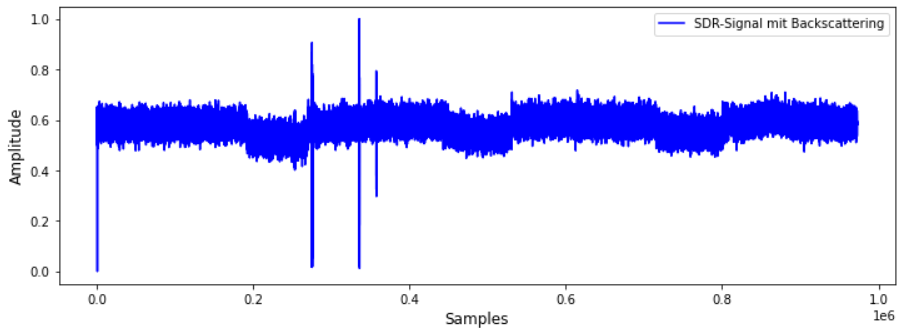
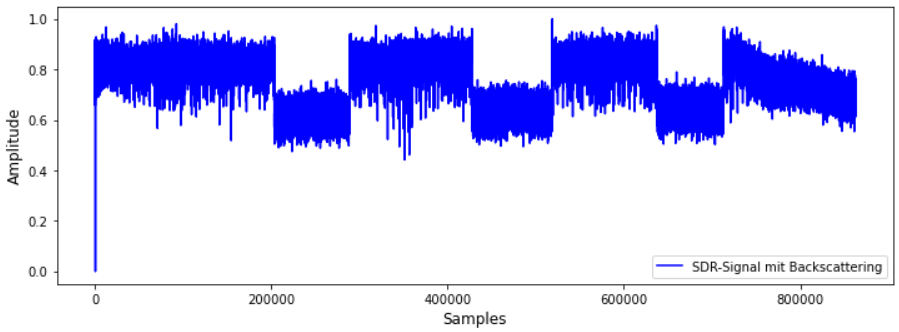
Detektion mit konstantem Trägersignal
Im ersten Versuch wurde ein konstantes RF-Signal als Träger verwendet. Bei einer Umschaltzeit von 100 ms sind die Signaländerungen deutlich sichtbar.
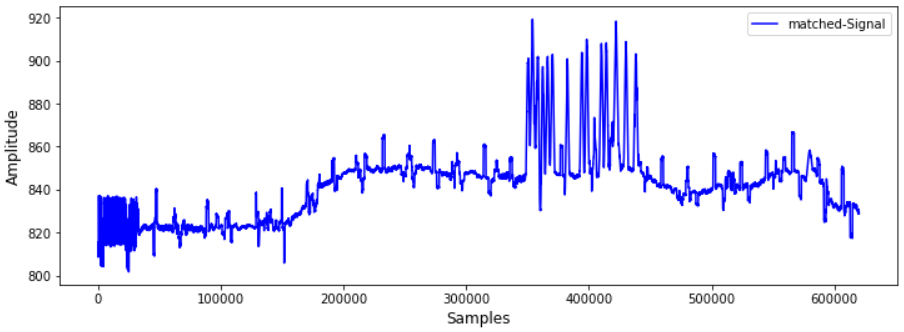
Durch Anwendung eines Matched Filters konnte der Amplitudenunterschied weiter verstärkt werden:
y(t) = s(t) * h(t)
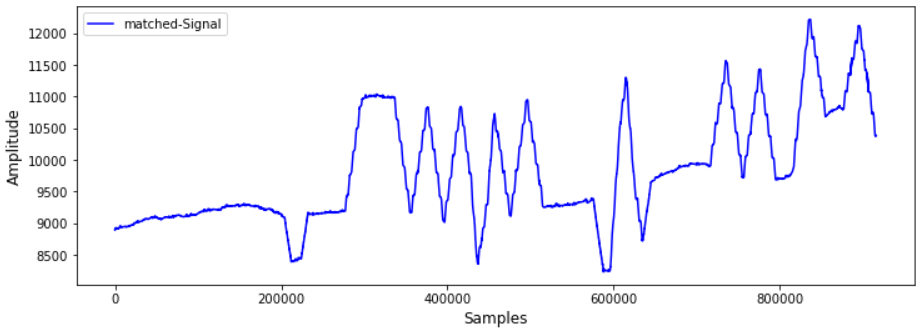
Bei einer Reduktion der Umschaltzeit auf 10 ms sind die Signaländerungen im Rohsignal nicht mehr sichtbar.
Nach Anwendung des Matched Filters werden die Umschaltungen jedoch wieder erkennbar, was die Bedeutung der Signalverarbeitung bestätigt.
Präambel-Detektion und Datenübertragung
Zur Synchronisation wird das empfangene Signal mit der bekannten Präambel korreliert:
R(τ) = Σ s(t) · p(t − τ)
Ein Peak in der Korrelation zeigt die Position des Datenframes an.
Als Testsignal wurde das Wort PAIND übertragen. Die empfangenen Daten lauteten:
PAIND → PAAFD
Dabei traten 2 Bitfehler auf.
Ein Datenframe setzt sich aus der bekannten Präambel (8 Bit) und der Nutzlast zusammen. Das Testwort PAIND wurde als 40 Bit Nutzdaten (5 Zeichen à 8 Bit) codiert; die angegebene BER bezieht sich auf diese Nutz-Bits im ausgewerteten Frame. Die Präambel dient der Synchronisation und fliesst in diese Fehlerquote nicht ein.
Übertragung mit WLAN-Signal
Bei Verwendung eines realen WLAN-Signals als Träger zeigte sich:
- Bei 10 ms keine zuverlässige Detektion
- Bei 100 ms detektierbar, aber mit höherer Fehlerquote
Die gemessene Bitfehlerrate beträgt:
BER = 9 / 40 = 0.225
Auch hier bezieht sich der Nenner auf dieselbe 40 Bit Nutzlast im Frame (Präambel ausgenommen).
Die erhöhte Fehlerrate ist auf die starken Fluktuationen des WLAN-Signals zurückzuführen.
Messung der minimalen Impedanzänderung
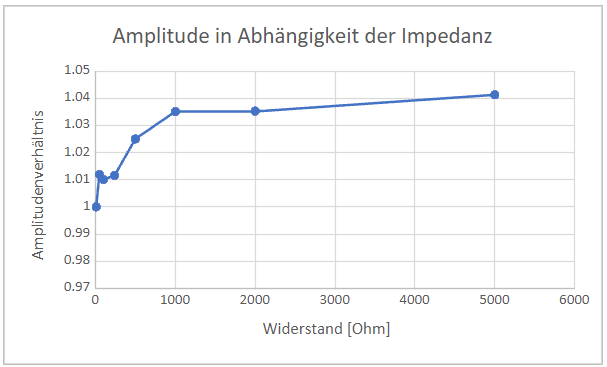
Zur Bestimmung der minimal notwendigen Impedanzänderung wurden verschiedene Widerstände getestet und das Amplitudenverhältnis gemessen.
Der Zusammenhang bestätigt das theoretische Modell:
- Bei etwa 1000 Ω werden ca. 90 % der maximalen Amplitude erreicht
- Unterhalb von etwa 50 Ω ist keine klare Signaländerung mehr detektierbar
Der Einfluss der Impedanz lässt sich über den Reflexionskoeffizienten beschreiben:
Γ = (ZL − Z0) / (ZL + Z0)
Zusammenfassung
Die Messungen zeigen:
- Backscattering ist unter Laborbedingungen zuverlässig möglich
- Signalverarbeitung (Matched Filter) ist entscheidend
- WLAN als Träger ist möglich, aber fehleranfällig
- Die Impedanzänderung bestimmt direkt die Detektierbarkeit
Damit konnte die Funktionsfähigkeit des Backscattering-Modulators experimentell bestätigt werden.
Systemkennwerte und Gesamtbewertung
Zur Bewertung des entwickelten Backscattering-Systems wurden zentrale Leistungsparameter analysiert: Energieverbrauch, Bitfehlerrate, Reichweite und Bitrate.
Energieverbrauch
Der Hauptvorteil von Ambient Backscattering ist der extrem geringe Energieverbrauch, da kein eigener HF-Sender betrieben werden muss.
Die Leistungsaufnahme der einzelnen Komponenten beträgt:
- RF-Switch: 1 µA · 2.75 V → 0.003 mW
- Spannungswandler: 0.08 mA · 3.3 V → 0.26 mW
- MOSFET (Referenz): 0.283 mW
Die Gesamtleistung ergibt sich zu:
P = U · I
und beträgt insgesamt:
Ptotal ≈ 0.546 mW
Ein grosser Teil der Verluste entsteht durch die Spannungsanpassung. Bei optimalem Design ohne Spannungswandler kann die Leistung auf wenige Mikrowatt reduziert werden:
P ≈ 3 µW
Damit eignet sich das System ideal für energieautarke IoT-Anwendungen.
Bitfehlerrate (BER)
Die Bitfehlerrate beschreibt das Verhältnis von fehlerhaften Bits zur Gesamtanzahl der übertragenen Bits:
BER = Nerror / Ntotal
In den Messungen wurden:
- 600 Bits übertragen
- 42 Fehler detektiert
Daraus ergibt sich:
BER = 42 / 600 ≈ 0.07
Durch Fehlerkorrekturverfahren kann die Bitfehlerrate reduziert werden. Beispielsweise ergibt sich mit einem Hamming-Code:
BER ≈ 0.036
Eine weitere Reduktion ist durch höhere Redundanz möglich.
Reichweite
Die maximale detektierbare Reichweite des Systems beträgt:
d ≈ 2 m
Die Versuche und die Übertragung der Daten wurden bei einem Abstand von einem Meter durchgeführt. Mit zunehmendem Abstand zeigte sich eine Zunahme des BER.
Im Vergleich zu klassischen Systemen wie Bluetooth Low Energy (10 – 40 m) ist die Reichweite deutlich geringer.
Die Begrenzung entsteht durch:
- geringe reflektierte Leistung
- starke Abhängigkeit von der Geometrie
- Mehrwegeausbreitung
Bitrate
Die erreichte Datenrate beträgt:
R ≈ 100 bit/s
Diese Bitrate ist für einfache Sensordaten ausreichend, beispielsweise für periodische Messwerte.
Für Anwendungen mit höherem Datenvolumen ist eine Optimierung der Modulation und Signalverarbeitung erforderlich.
Gesamtbewertung
Die Ergebnisse zeigen, dass Ambient Backscattering eine funktionierende und extrem energieeffiziente Kommunikationsmethode darstellt.
- sehr geringer Energieverbrauch im µW-Bereich möglich
- funktionierende Datenübertragung nachgewiesen
- begrenzte Reichweite und Datenrate
Damit eignet sich das System insbesondere für Anwendungen, bei denen Energieeffizienz wichtiger ist als hohe Datenrate oder grosse Reichweite.
Erfüllung der Zielvorgabe (übertragene Bits)
Ziel dieser Arbeit war es zu demonstrieren, dass mittels Ambient Backscattering mindestens 8 Bits zuverlässig übertragen werden können.
Ergebnisse mit konstantem Trägersignal
Im Versuch mit einem konstanten externen Signal (SDR) wurden insgesamt 40 Nutz-Bits übertragen (wie im Frame-Test mit Präambel und Nutzlast beschrieben).
Dabei traten lediglich 2 Bitfehler auf, was einer Bitfehlerrate von:
BER = 2 / 40 = 0.05
entspricht.
Die geforderte Übertragung von 8 Bits wird damit deutlich erfüllt. Zusätzlich kann die Fehlerrate durch einfache Fehlerkorrekturverfahren weiter reduziert werden.
Ergebnisse mit WLAN als Trägersignal
Bei Verwendung eines realen WLAN-Signals als Träger wurden ebenfalls 40 Nutz-Bits ausgewertet.
Dabei wurden 9 Bitfehler detektiert:
BER = 9 / 40 = 0.225
Die erhöhte Fehlerrate ist auf die nicht konstante Amplitude und die zeitliche Struktur des WLAN-Signals zurückzuführen.
Bewertung
Die Ergebnisse zeigen klar:
- Die grundlegende Funktionsfähigkeit von Ambient Backscattering ist nachgewiesen
- Die Zielvorgabe von 8 Bits wurde deutlich übertroffen
- Die Übertragung mit kontrolliertem Trägersignal ist zuverlässig
- Die Nutzung von WLAN als Träger erfordert zusätzliche Optimierungen
Für praktische IoT-Anwendungen ist insbesondere die Robustheit gegenüber realen, stark schwankenden Trägersignalen weiter zu verbessern.
Fazit und Ausblick
In dieser Arbeit wurde gezeigt, dass das Verfahren des Ambient Backscattering grundsätzlich funktioniert und zur Datenübertragung eingesetzt werden kann.
Mit dem entwickelten Backscattering-Modulator konnten Daten erfolgreich über ein externes Trägersignal übertragen werden. Die vier aufgestellten Hypothesen konnten dabei experimentell bestätigt werden:
- Modulation durch Impedanzänderung ist möglich
- Interferenz führt zu messbaren Amplitudenänderungen
- Die Antennencharakteristik beeinflusst die Signalstärke wesentlich
- Die detektierten Signaländerungen können zur Bitübertragung genutzt werden
Damit ist Ambient Backscattering als energieeffiziente Kommunikationsmethode grundsätzlich validiert.
Optimierungspotenzial
Für den praktischen Einsatz in IoT-Systemen sind jedoch weitere Optimierungen notwendig:
- Antennendesign: Die Antennengrösse muss reduziert werden, ohne die Reflexionseigenschaften wesentlich zu verschlechtern.
- Signalrobustheit: Die Übertragung über reale Trägersignale wie WLAN muss stabilisiert werden, da diese starke Fluktuationen aufweisen.
- Modulationsverfahren: Der Einsatz von Frequenzumtastung (FSK) kann die Robustheit gegenüber Amplitudenschwankungen deutlich verbessern.
- Fehlerkorrektur: Verfahren wie Blockcodes, CRC oder ARQ sind notwendig, um verbleibende Bitfehler zuverlässig zu korrigieren.
Systemverhalten und Herausforderungen
Ein zentrales Ergebnis der Experimente ist die starke Abhängigkeit des Systems von der räumlichen Geometrie.
Durch Mehrwegeausbreitung und Interferenz ist die Signalqualität stark positionsabhängig. Kleine Änderungen in der Anordnung der Antennen können zu konstruktiver oder destruktiver Überlagerung führen.
Für praktische Anwendungen ist es daher sinnvoll, Algorithmen zu entwickeln, die eine optimale Positionierung automatisch bestimmen oder adaptiv auf veränderte Bedingungen reagieren.
Ausblick
Ambient Backscattering bietet ein grosses Potenzial für zukünftige energieautarke IoT-Systeme, insbesondere für Anwendungen mit sehr geringem Energiebedarf und niedriger Datenrate.
Durch die Kombination aus optimierter Antennentechnik, robuster Signalverarbeitung und geeigneten Codierungsverfahren kann das System weiter verbessert und in realen Anwendungen eingesetzt werden.
Autor: Ruedi von Kryentech
Erstellt am: 06.04.2026 · Zuletzt aktualisiert: 06.04.2026
Fachlicher Stand zum Zeitpunkt der letzten Aktualisierung.