NOMA für IoT – Grundlagen und praktische Umsetzung
Non-Orthogonal Multiple Access, Mehrnutzer-Funk und Software Defined Radio
Kapitel 1 – Einleitung: Warum NOMA für IoT wichtig ist
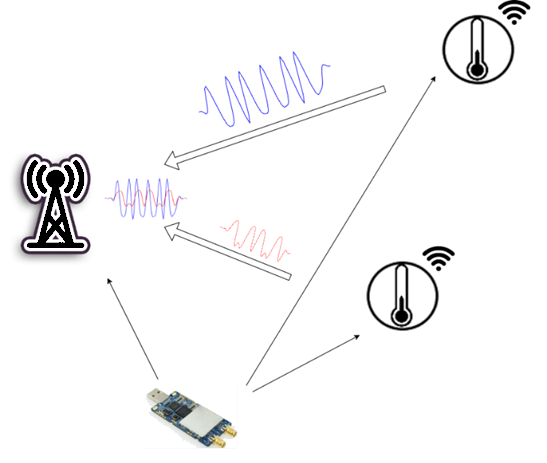
Im Folgenden wird beschrieben, wie Non-Orthogonal Multiple Access (NOMA) mit Software Defined Radio (SDR) umgesetzt und im Labor erprobt wurde. Ausgangspunkt ist die Frage, ob sich zwei Nutzer gleichzeitig im selben Frequenzband so übertragen lassen, dass ein Empfänger beide Datenströme wieder trennen kann – ohne sie durch Zeitslots oder getrennte Träger strikt zu isolieren.
Im Versuchsaufbau arbeiteten zwei unabhängige Sender (je ein SDR) und ein gemeinsamer Empfänger. Die Basisbandverarbeitung (Filter, Synchronisation, Demodulation und sukzessive Interferenzunterdrückung, SIC) wurde überwiegend in GNU Radio und ergänzend in Python umgesetzt; ausgewertet wurden unter anderem Bitfehlerrate (BER) und die Abhängigkeit vom Leistungsverhältnis der Nutzer. Die Abbildungen und Kurven auf dieser Seite stammen aus denselben Messungen.
Die drahtlose Datenübertragung spielt eine zentrale Rolle in modernen technischen Systemen. Besonders im Bereich des Internet of Things (IoT) steigt die Anzahl vernetzter Geräte stark an. Sensoren, Steuerungen und eingebettete Systeme senden laufend Daten – oft gleichzeitig und auf begrenzten Funkressourcen.
Dabei entsteht ein grundlegendes Problem:
Kernpunkt: Je mehr Geräte senden, desto häufiger kommt es zu Kollisionen.
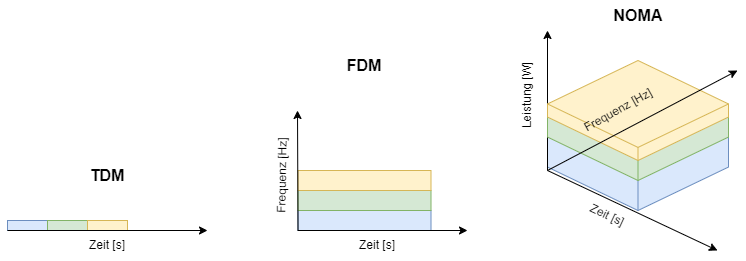
Gerade bei energieoptimierten IoT-Systemen wird oft auf aufwendige Protokolle oder Rückmeldungen verzichtet. Das spart Energie, bedeutet aber auch, dass kollidierende Datenpakete häufig verloren gehen. Klassische Verfahren wie Zeitmultiplex (TDM) oder Frequenzmultiplex (FDM) versuchen dieses Problem zu umgehen, indem sie die Nutzer strikt trennen – entweder in der Zeit oder in der Frequenz. Diese Ansätze skalieren jedoch nur begrenzt und nutzen die verfügbaren Ressourcen nicht optimal aus.
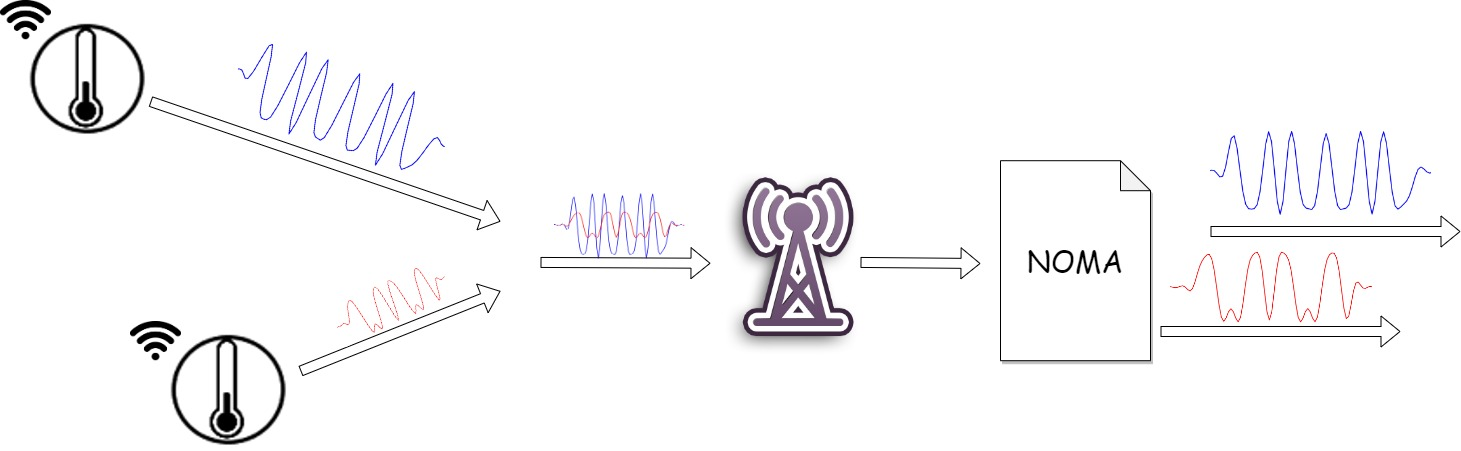
Eine alternative Lösung ist Non-Orthogonal Multiple Access (NOMA).
Zentraler Unterschied: Mehrere Teilnehmer senden gleichzeitig auf derselben Frequenz.
Die Trennung der Signale erfolgt nicht mehr über getrennte Kanäle, sondern durch Signalverarbeitung im Empfänger. Dabei werden überlagerte Signale gezielt rekonstruiert und voneinander getrennt.
In der Theorie wirkt dieses Konzept relativ einfach. In der Praxis entstehen jedoch zahlreiche Herausforderungen:
- Rauschen und Störungen
- Frequenz- und Phasenfehler
- unterschiedliche Signalstärken
- Synchronisationsprobleme
Damit NOMA zuverlässig funktioniert, muss der Empfänger komplexe Verarbeitungsschritte durchführen. Ein zentrales Verfahren dabei ist die sukzessive Interferenzunterdrückung (SIC), bei der Signale schrittweise erkannt, rekonstruiert und vom Gesamtsignal abgezogen werden.
Dieser Artikel zeigt, wie sich ein solches System praktisch umsetzen lässt – von den Grundlagen der Funkübertragung bis zur realen Signalverarbeitung mit Software Defined Radio.
Kapitel 2 – Grundlagen: Software Defined Radio und Datenübertragung
Software Defined Radio (SDR)
Ein Software Defined Radio (SDR) ist ein Funksystem, bei dem möglichst viele klassische Hardware-Funktionen durch Software ersetzt werden.
In einem klassischen Funkempfänger sind viele Schritte fest in Hardware implementiert:
- Mischer
- Filter
- Demodulator
Beim SDR hingegen wird das Signal möglichst früh digitalisiert und danach rein softwarebasiert verarbeitet.
Funktionsprinzip eines SDR
Der Signalfluss sieht vereinfacht so aus:
- Antenne empfängt das HF-Signal.
- Der Mischer verschiebt das Signal in eine niedrigere Frequenz (Zwischenfrequenz oder Basisband).
- Der ADC (Analog-Digital-Wandler) digitalisiert das Signal.
- Die digitale Signalverarbeitung übernimmt:
- Filterung
- Demodulation
- Synchronisation
- Dekodierung
Vorteil für diesen Aufbau
Entscheidend: Das gesamte Verhalten des Funkempfängers ist programmierbar.
Das ist genau der Grund, warum SDR für NOMA gut passt:
- mehrere überlagerte Signale lassen sich flexibel analysieren
- Algorithmen wie SIC lassen sich direkt implementieren
- Anpassungen sind ohne Hardwareänderung möglich
Grundlagen der digitalen Datenübertragung
Damit ein Funksystem funktioniert, müssen digitale Daten in ein analoges Signal umgewandelt werden.
Modulation – Beispiel QPSK
In diesem System wird Quadraturphasenumtastung (QPSK) verwendet.
Eigenschaften:
- 2 Bit pro Symbol
- doppelte Datenrate gegenüber BPSK
- robuste und weit verbreitete Modulation
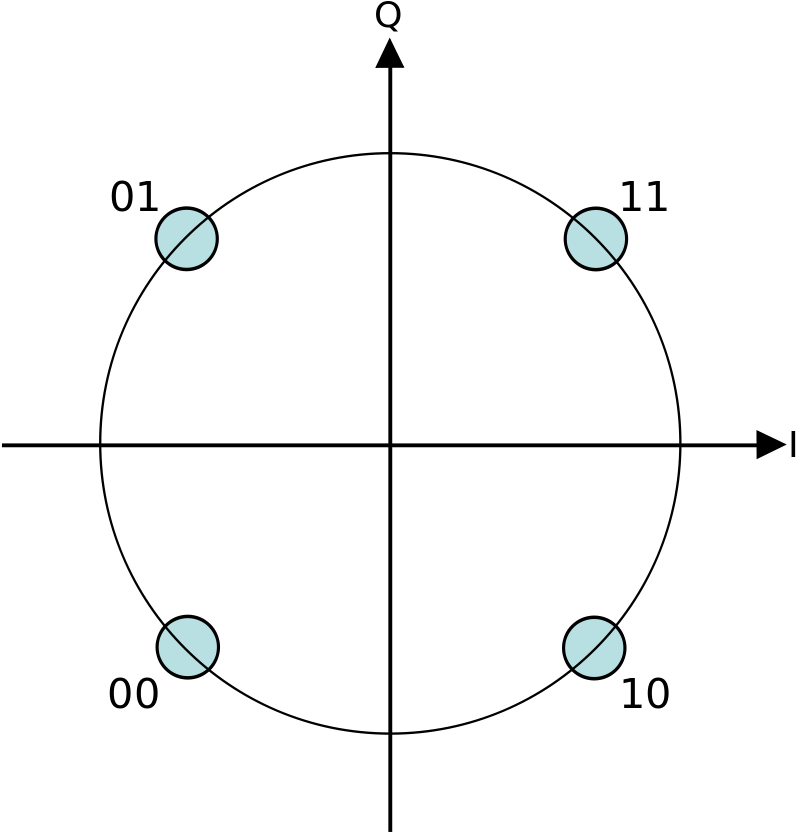
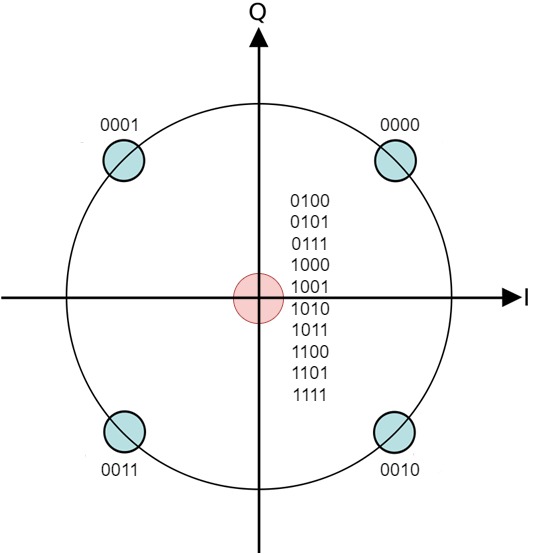
Die Symbole werden als Punkte in der komplexen Ebene dargestellt:
- Realteil → In-Phase (I)
- Imaginärteil → Quadratur (Q)
Typische Symbolwerte (I, Q):
- (1, 1)
- (−1, 1)
- (−1, −1)
- (1, −1)
Hinweis: Daraus ergibt sich das übliche QPSK-Konstellationsdiagramm.
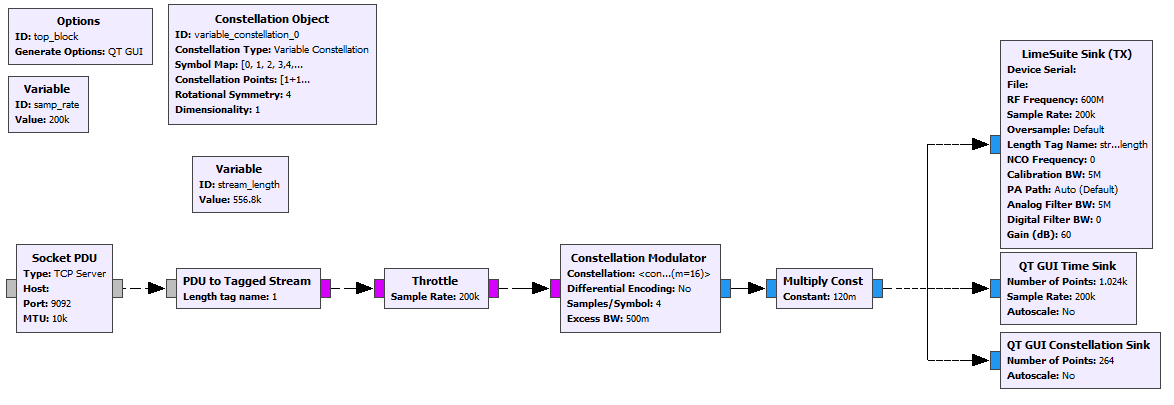
Für das erweiterte QPSK (inkl. Anpassung der Bytes für GNU Radio) wird im Sender die Funktion adjust_data verwendet (Auszug aus BAT_NOMA_Transmitter.py):
def adjust_data(data): # erweitertes QPSK
new_data = np.zeros(len(data) * 2, dtype=int)
data_temp = np.zeros(len(data) * 2, dtype=int)
for i in np.arange(len(data_temp)):
data_temp[i] = data[int(i / 2)]
for j in np.arange(len(new_data)):
if (j % 2) == 0:
new_data[j] = (np.uint8(np.uint8(data_temp[j] / (64)) * 16)) | (
np.uint8(np.uint8(data_temp[j] * 4) / 64))
if (j % 2) == 1:
new_data[j] = np.uint8(np.uint8(np.uint8(data_temp[j] / 4) * 64) / 4) | (
np.uint8(np.uint8(data_temp[j] * 64) / 64))
return new_dataIm GNU-Radio-Block Constellation Object sind die 16 Symbolpositionen u. a. mit vier QPSK-Punkten und mehreren Null-Symbolen (0+0j) konfiguriert (siehe Anhang der Arbeit).
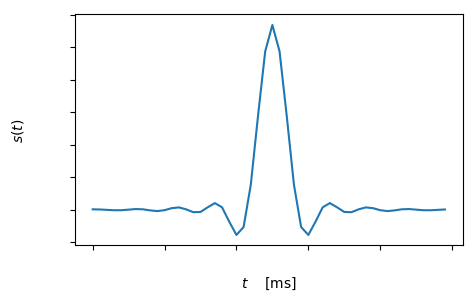
Impulsform – Root Raised Cosine
Damit die Symbole sauber übertragen werden, wird eine spezielle Impulsform verwendet: ein Root-Raised-Cosine-Filter (RRC).
Warum?
- reduziert Intersymbolinterferenz (ISI)
- ermöglicht saubere Symboltrennung
- optimiert die Bandbreitennutzung
Wichtig: Sender und Empfänger verwenden zusammen einen Matched Filter (typischerweise je ein RRC); idealerweise hebt sich die ISI dabei auf.
Die Impulsformung im Empfänger verwendet explizit berechnete RRC-Koeffizienten und die Faltung zu rcos (Auszug aus BAT_NOMA_Receiver.py):
rrcos = np.array(
[1, 1, 1, 0.95256299, 0.7945013, 0.56381161, 0.3173851, 0.11599391, 0.00930381])
rrcos = np.sqrt(np.concatenate((np.array([1]), rrcos, np.zeros(50 - 19), np.flip(rrcos))))
rrcos = np.fft.fftshift(np.real(np.fft.ifft(rrcos)))
rrcos = rrcos / np.sqrt(np.sum(np.square(rrcos)))
rcos = np.convolve(rrcos, rrcos)Der Sender nutzt parallel den RRC-Block in GNU Radio; die Koeffizienten müssen zur gleichen Symbolrate/SPS passen.
Frequenzwahl in der Praxis
Die Wahl der Frequenz hat grossen Einfluss auf die Signalqualität.
Typische Beobachtungen:
- 2,4 GHz → viele Störungen (WLAN, Bluetooth)
- niedrigere Frequenzen → oft stabilere Übertragung
Vorteil tieferer Frequenzen: weniger Interferenzen und oft geringerer Frequenzoffset zwischen den Geräten.
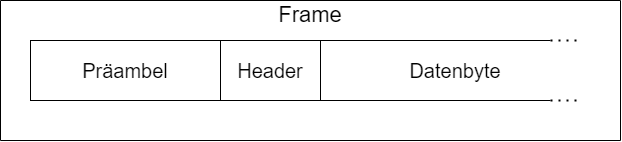
Aufbau eines Datenpakets
Für die Übertragung werden kleine Burst-Pakete verwendet – typisch für IoT.
Ein Paket besteht aus:
- Präambel – dient zur Synchronisation und zur Erkennung des Signals
- Header – enthält Metadaten (z. B. Empfänger)
- Nutzdaten – die eigentliche Information
Warum die Präambel wichtig ist
Der Empfänger weiss nicht, wann ein Signal beginnt. Die Präambel dient dazu,
- das Signal im Datenstrom zu finden,
- die Zeitbasis zu synchronisieren,
- die Demodulation vorzubereiten.
Datenfluss im System
Gesamtablauf – Sender:
- Daten → QPSK-Modulation
- Pulsformung (RRC)
- Hochmischen auf die Trägerfrequenz
- Aussenden über die Antenne
Gesamtablauf – Empfänger:
- Empfang über die Antenne
- Runtermischen ins Basisband
- Digitalisierung
- Filterung und Synchronisation
- Demodulation
- Datenauswertung
Wichtig für NOMA
Alle diese Grundlagen sind entscheidend, weil NOMA nur funktioniert, wenn das Signal sehr sauber verarbeitet wird.
Schon kleine Fehler führen zu:
- falscher Symbolerkennung
- schlechter Interferenzsubtraktion
- nicht rekonstruierbaren Nutzersignalen
Kapitel 3 – Funktionsweise von NOMA
In diesem Aufbau wird NOMA als Power-Domain-NOMA behandelt: die Nutzer unterscheiden sich primär durch die empfangene Leistung (durch unterschiedliche Sendeamplituden und Kanaldämpfung). Der Empfänger nutzt diese Hierarchie, um zuerst den stärksten „Layer“ zu decodieren und ihn schrittweise abzuziehen. Die folgenden Abschnitte formalisieren dieses Bild und führen zum SINR – die Messauswertung in Kapitel 7 bezieht sich auf dieselben Grössen.
Grundidee von NOMA
Klassische Mehrfachzugriffsverfahren trennen Nutzer strikt:
- TDM → unterschiedliche Zeiten
- FDM → unterschiedliche Frequenzen
NOMA macht das Gegenteil: Mehrere Teilnehmer senden gleichzeitig auf derselben Frequenz und zur selben Zeit.
Die Trennung erfolgt erst im Empfänger – durch Signalverarbeitung.
Mathematisches Modell
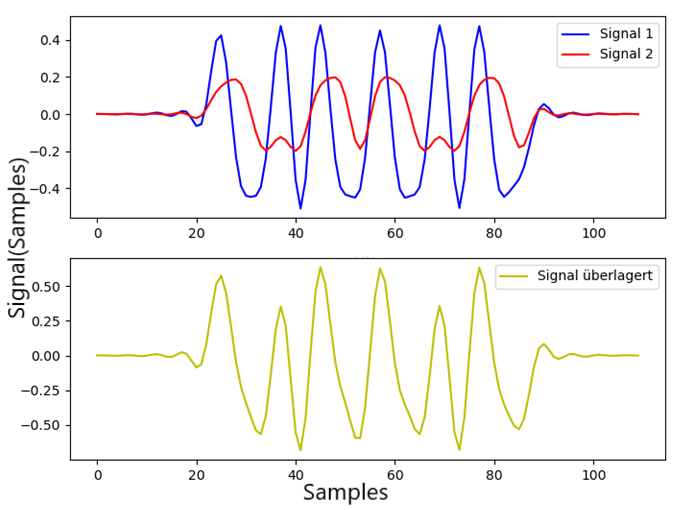
Das empfangene Signal ist die Überlagerung mehrerer Sender:
\[ x(t) = \sum_{k=1}^{N} P_k \cdot s_k(t) \]
- \(s_k(t)\): Signal des Senders \(k\) (z. B. modulierte Symbole inkl. Pulsformung)
- \(P_k\): zugehörige Sendeleistung (oder Amplitudenfaktor, je nach Modellierung)
- \(x(t)\): Gesamtsignal am Empfangsort (vor Rauschen; Kanal kann separat modelliert werden)
Kernpunkt: Alle Nutzersignale liegen im selben Frequenzband und sind gleichzeitig aktiv.
Trennung über die Leistung (Power Domain)
Der zentrale Trick bei gängigem Power-Domain-NOMA:
Unterschiedliche empfangene Signalstärken – typischerweise durch unterschiedliche Sendeleistung und/oder Dämpfung im Kanal.
Typisches Setup (idealisiert):
- weiter entfernter oder schwächerer Kanal → höhere Sendeleistung, damit am Empfänger noch ausreichend Energie ankommt
- naher Sender → geringere Sendeleistung, am Empfänger trotzdem noch detektierbar
Dadurch entsteht am Empfänger grob gesprochen: ein dominantes Signal und ein oder mehrere schwächere Signale darunter.
Was passiert beim Empfänger?
Das empfangene Signal sieht nicht mehr wie ein sauberes Einzelnutzer-QPSK-Signal aus, sondern ist
- überlagert,
- verrauscht,
- und durch Kanaleffekte verzerrt.
Intuition: Das schwächere Nutzersignal wirkt zunächst wie zusätzliches Rauschen gegenüber dem stärkeren.
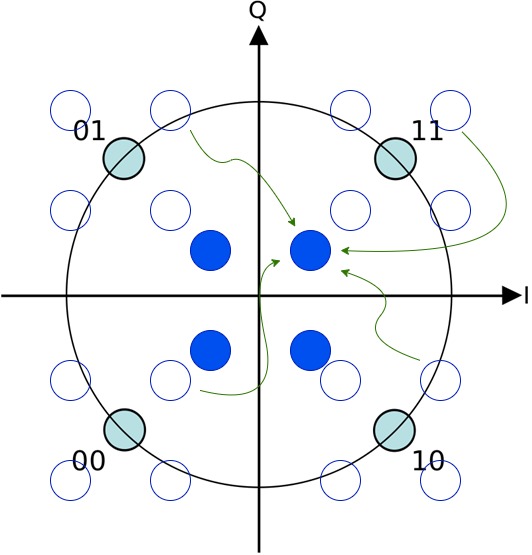
Sukzessive Interferenzunterdrückung (SIC)
Das zentrale Verfahren zur Nutzertrennung ist die Successive Interference Cancellation (SIC) – sukzessive Interferenzunterdrückung.
Ablauf Schritt für Schritt
- Starkes Signal erkennen – es ist dominant im Gesamtsignal und kann (zunächst) wie ein Einzelnutzersignal demoduliert werden.
- Signal rekonstruieren – aus den decodierten Symbolen wird das Beitragssignal des starken Nutzers möglichst genau wieder aufgebaut (inkl. Kanalschätzung).
- Vom Empfangssignal subtrahieren – die Rekonstruktion wird vom Gesamtsignal abgezogen.
- Schwaches Signal wird sichtbar – war zuvor im Überlagerungs-„Rauschen“ verborgen, kann nun ausgewertet werden.
- Wiederholen – für weitere Nutzer in der Reihenfolge abnehmender empfangener Stärke.
Warum das funktioniert
Das gelingt nur, wenn
- die Signalstärken (bzw. empfangenen Leistungen) klar getrennt sind,
- das dominante Signal zuverlässig erkannt wird,
- und die Rekonstruktion sehr genau ist.
Sonst: Es bleibt zu viel Restfehler im Signal – nachfolgende Demodulationsschritte brechen ein.
Betrachtung im Konstellationsdiagramm
Bei QPSK ergibt sich ein charakteristisches Verhalten:
- ohne NOMA → vier klare Punkte in der I/Q-Ebene
- mit NOMA → die effektiven Symbolpositionen verschieben sich durch die Überlagerung
Intuition bei zwei QPSK-Nutzern: Jedes Symbol des einen Nutzers kann mit jedem Symbol des anderen kombiniert auftreten – grob können aus vier Einzelpunkten bis zu 16 unterscheidbare Überlagerungszustände werden (sofern beide Anteile relevant sind).
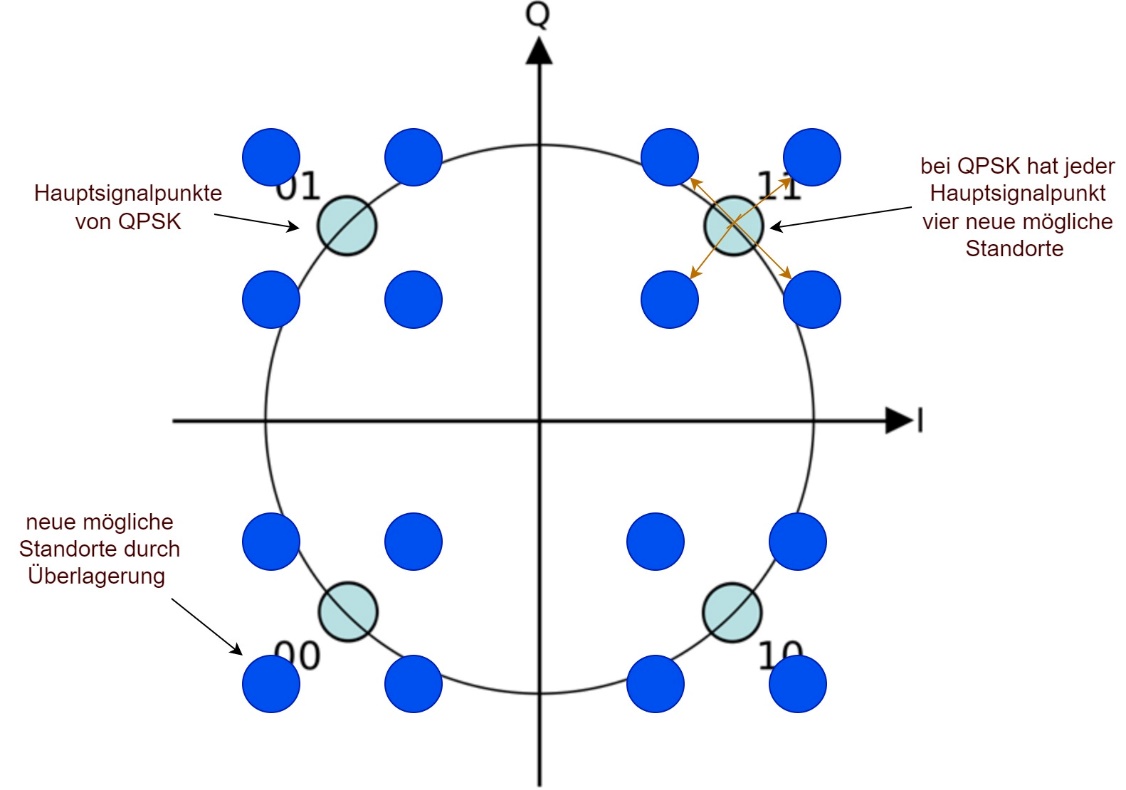
Problem: Wenn das schwächere Signal zu stark ist, liegen Punkte nahe an Entscheidungsgrenzen – die Bitfehlerrate steigt. Wenn es zu schwach ist, geht es im Rauschen unter.
Fazit: Es gibt ein optimales Leistungsverhältnis bzw. eine sorgfältige Planung von Leistungen und Kanalcodierung.
Einfluss von Rauschen und Kanal
In der Praxis kommen hinzu:
- thermisches Rauschen
- Kanal-Dämpfung und Schwund
- Phasen- und Frequenzfehler (Trägeroffset)
Das Signal ist damit nicht nur überlagert, sondern zusätzlich gestört – Schätzung und Subtraktion in der SIC werden anspruchsvoller.
Signal-Rausch- bzw. Signal-zu-Interferenz-Verhältnis
Für Nutzer \(k\) lässt sich ein wirksames Verhältnis in der Form
\[ \mathrm{SINR}_k = \frac{P_k \cdot g_k}{\sum_{i \neq k} P_i \cdot g_i + N} \]
schreiben: Zähler Nutzsignal von \(k\), Nenner Interferenz durch andere Nutzer plus Rauschleistung \(N\). Die \(g_k\) sind die (hier vereinfacht angenommenen) Kanalverstärkungen.
Hinweis: Streng genommen handelt es sich um ein SINR (Signal-zu-Interferenz-und-Rausch-Verhältnis); oft wird es im Mehrnutzerkontext vereinfachend dem SNR zugeordnet. Andere Signale wirken wie zusätzliches Rauschen im Nenner.
Grenzen von NOMA
NOMA ist kein Allheilmittel. Kritisch sind u. a.:
- ungünstiges Leistungsverhältnis
- schlechte Synchronisation
- ungenaues Subtrahieren in der SIC
- starkes Rauschen oder sich schnell ändernde Kanäle
Dann bricht das Verfahren schnell zusammen – Fehler propagieren von Schritt zu Schritt.
Wichtige Erkenntnis
NOMA ist kein reines „Funkproblem“ – es ist in hohem Masse ein Signalverarbeitungsproblem.
Der Erfolg hängt stark ab von:
- wie gut das Gesamtsignal geschätzt und synchronisiert wird,
- wie präzise starke Nutzer rekonstruiert und subtrahiert werden.
Kapitel 4 – Datenverarbeitung: Vom Sender bis zum Empfänger
In diesem Kapitel geht es um den kompletten Signalfluss im System – nicht nur was passiert, sondern wie die Daten konkret verarbeitet werden müssen, damit NOMA überhaupt funktioniert.
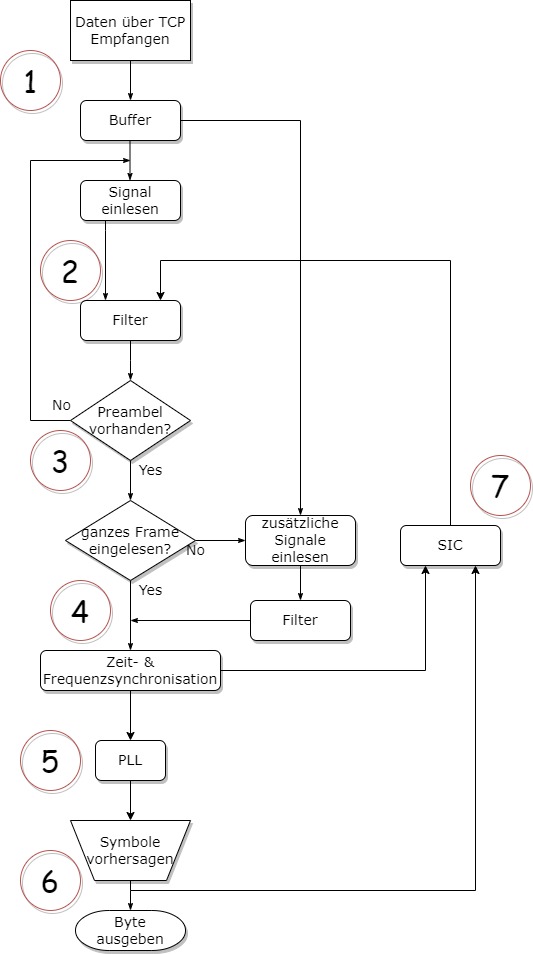
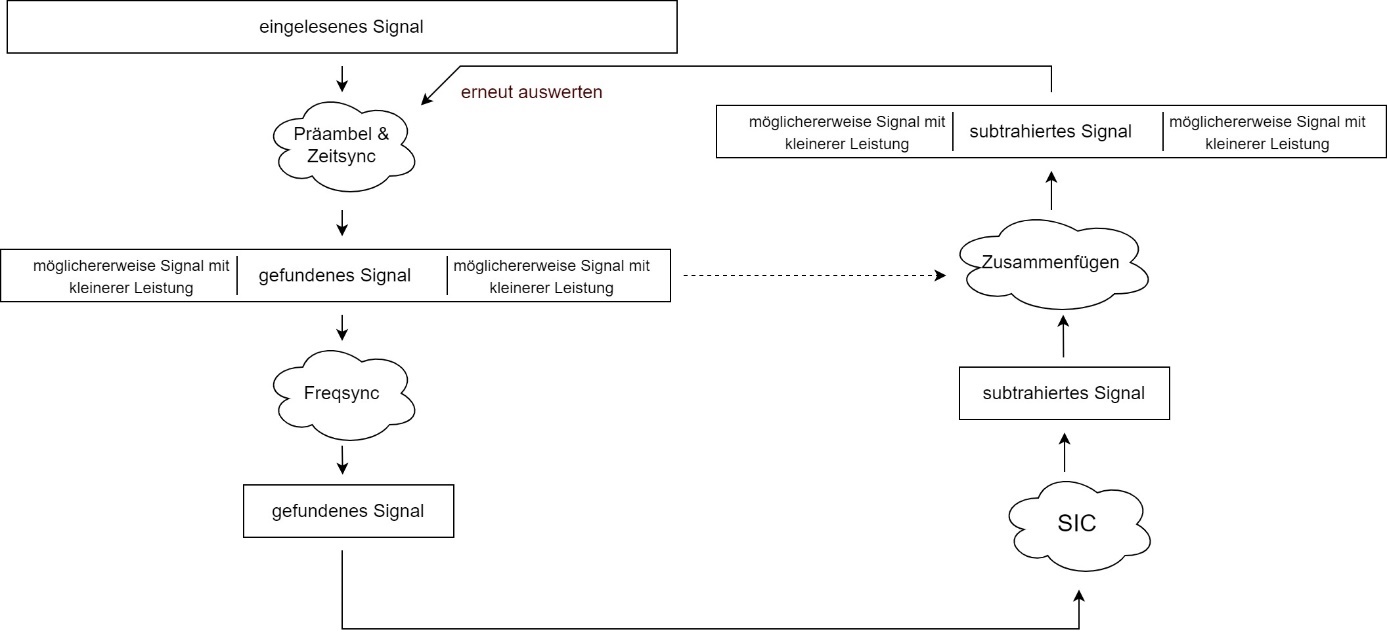
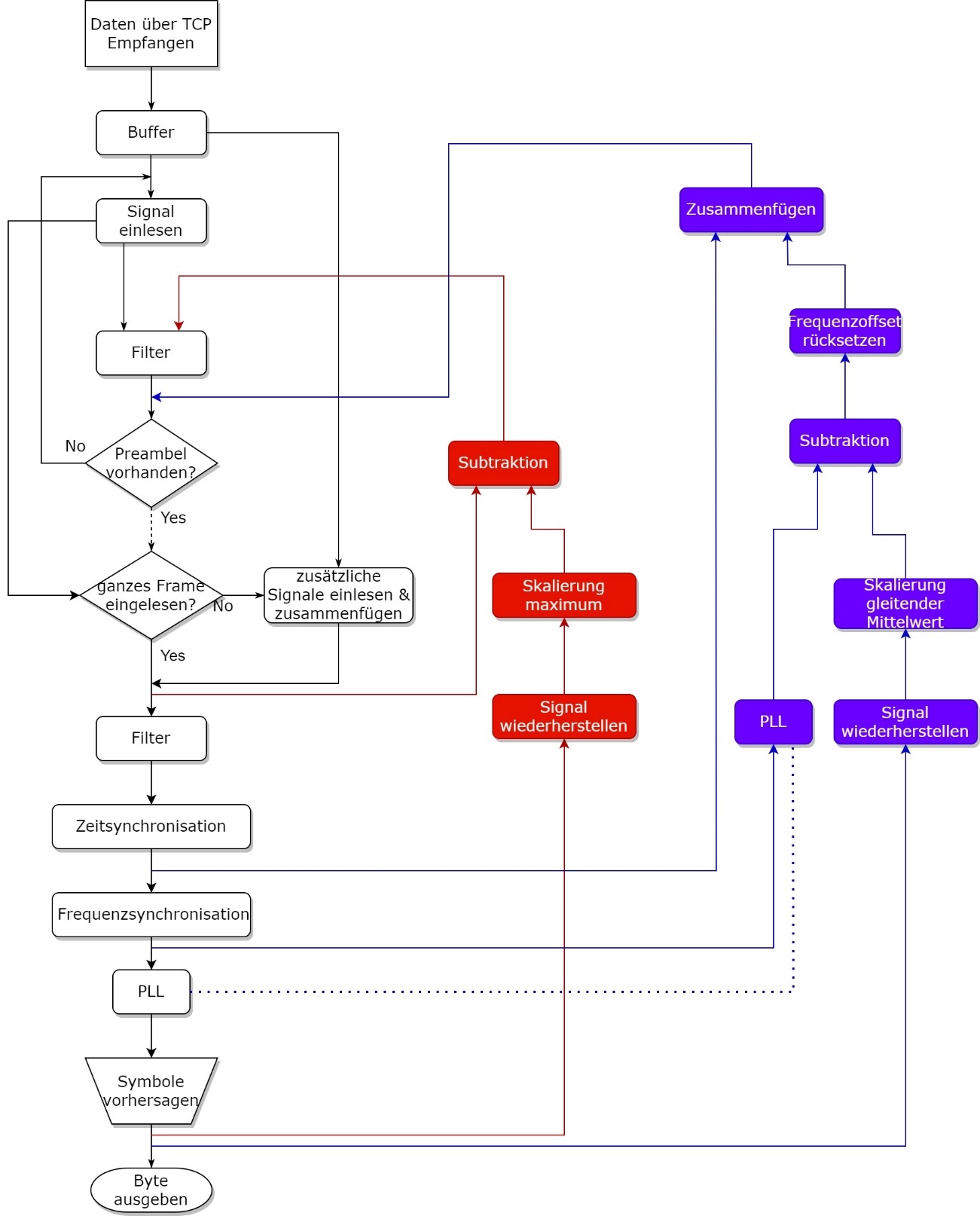
Am Empfänger liegt nach dem SDR ein kontinuierlicher Strom komplexer Basisband-Samples vor (I/Q). Die weiteren Schritte laufen softwareseitig: Pufferung, Matched Filter (RRC), Suche der Präambel per Korrelation, Frequenz- und Taktanpassung, Downsampling auf Symbolrate, harte Entscheidung auf QPSK (+ Null-Symbol), anschliessend Rekonstruktion des starken Nutzers für die SIC. GNU Radio übernimmt den grossen Teil der Signalflussgraphik; kritische Auswertungen und die SIC-Arithmetik lassen sich in einem Python-Skript kapseln, das auf die gleiche Samplebasis zugreift wie der Flowgraph (File Sink, TCP oder Embedded Python Block).
Gesamtübersicht
Das System besteht aus drei Hauptteilen:
- Sender (TX)
- Funkkanal
- Empfänger (RX + Signalverarbeitung)
Ablauf in Kurzform: Daten → Modulation → Funk → Empfang → Verarbeitung → Dekodierung → (Vorbereitung) SIC
Verarbeitung im Sender
1. Datenaufbereitung
Die Daten werden als kleine Burst-Pakete übertragen. Typischer Aufbau:
- Präambel (Synchronisation)
- Header (Metadaten)
- Nutzdaten
Hinweis: Kurze Pakete sind typisch für IoT und begrenzen gleichzeitig die Zeit, in der Kanal und Taktung als „fast konstant“ angenommen werden können.
2. Erweiterte QPSK-Modulation (Praxispunkt)
In der Theorie reicht klassisches QPSK. In der Praxis trat hier ein Problem auf:
SDR erzeugt Einschwing- und Übergangseffekte, wenn zeitweise „kein Nutzsignal“ gesendet wird. Das führt zu Störungen am Burst-Anfang und kann Nutzdaten praktisch unbrauchbar machen.
Lösung: Null-Symbol – die Modulation wurde um ein zusätzliches Symbol (0, 0) in der I/Q-Ebene ergänzt, das gesendet wird, wenn keine Nutzdaten anliegen (Ruhe-/Füllphase).
Vorteil: Der Sendepfad bleibt durchgehend „aktiv“, Einschwingartefakte am Beginn echter Nutzdaten lassen sich deutlich reduzieren.
3. Pulsformung
Nach der Modulation folgt die Pulsformung mit Root Raised Cosine (RRC) – wie in Kapitel 2 beschrieben: bandbegrenzend, mit matched Filter am Empfänger, um ISI zu minimieren.
4. Leistungsanpassung (entscheidend für NOMA)
Vor dem Senden wird das Basisbandsignal amplitudenmässig skaliert – unterschiedliche Sender erhalten unterschiedliche Amplituden (bzw. Leistungen), damit am Empfänger die gewünschte Dominanz eines Nutzers entsteht und die SIC-Reihenfolge sinnvoll wird.
5. Übertragung über SDR
Im SDR: das (diskrete) Basisbandsignal wird erzeugt, auf die Trägerfrequenz gemischt (z. B. 434 MHz) und über die Antenne ausgesendet.
Funkkanal
Zwischen Sender und Empfänger:
- überlagern sich die Nutzerbeiträge zu einem empfangenen Wellenzug,
- nimmt die empfangene Leistung typischerweise mit der Distanz ab,
- kommt Rauschen hinzu,
- wirken ggf. Fremdstörer oder Mehrwegeeffekte.
Ergebnis: ein einziges komplexes, gestörtes Empfangssignal.
Verarbeitung im Empfänger
1. Empfang und Digitalisierung
Antenne → SDR (Mischung ins Basisband) → ADC: es entstehen komplexe digitale Samples.
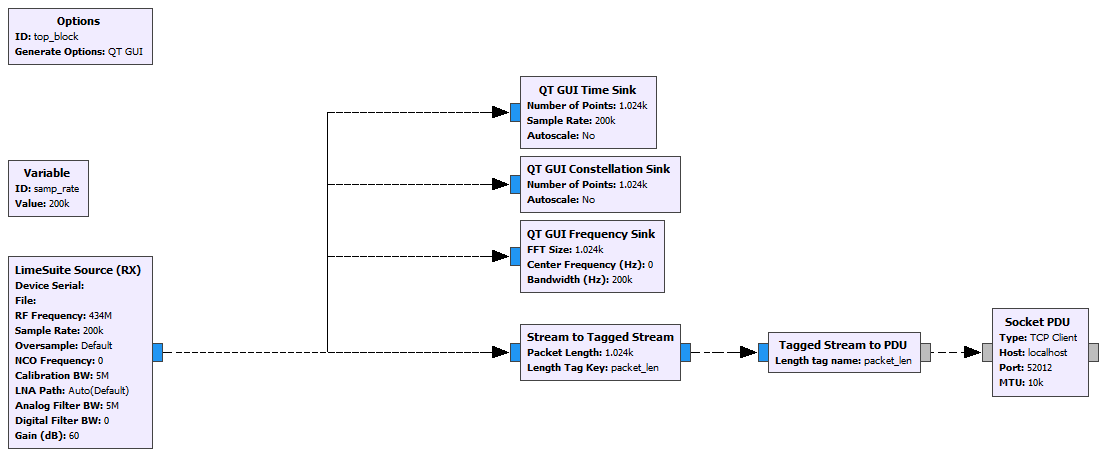
2. Buffering
Der Samplestrom wird in einen Puffer geschrieben. Grund: der Datenstrom ist kontinuierlich, aber die Auswertung erfolgt burstweise – Pakete müssen erst gefunden und ausgeschnitten werden.
3. Matched Filter
Das Signal wird mit dem zum Sender passenden Matched Filter (hier: RRC-Gegenstück) gefiltert. Ziel: optimale SNR an den Symbolzeitpunkten und Wiederherstellung der erwarteten Pulsform.
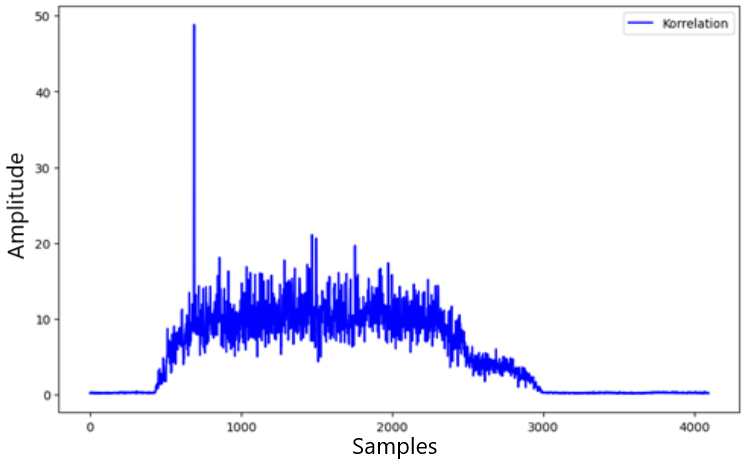
4. Präambel-Erkennung
Das Signal wird nach dem bekannten Präambelmuster durchsucht, typischerweise per Kreuzkorrelation. Ein ausgeprägter Peak bedeutet: Paket gefunden, Startindex bekannt.
Im Empfänger werden Referenz-FFT der Präambel über mehrere Frequenzbänder vorbereitet; die Zeitsuche läuft über das Maximum der IFFT-Korrelation (Auszug aus BAT_NOMA_Receiver.py):
preamble = np.exp(0.5j * np.pi * (symbols[:preamble_len] + 0.5))
pus4 = np.vstack((np.array(preamble), np.zeros((3, len(preamble)))))
pus4 = np.reshape(pus4, 4 * preamble_len, order='F')
pus4fft = np.zeros((sync_bands, fft_len), dtype=np.complex64)
for i in np.arange(sync_bands):
pus4fft[i, :] = np.fft.fft(np.concatenate((
pus4 * np.exp(2j * np.pi / (4 * preamble_len) / 3
* (i - sync_bands / 2) * np.arange(4 * preamble_len)),
np.zeros(fft_len - 4 * preamble_len, dtype=np.complex64))))
# ... nach RRC: rxfft = np.fft.fft(rxp)
# ccp = max über Bänder von |ifft(rxfft * conj(pus4fft[i]))| → Peak i0Vollständige Schleife inkl. Schwellwert tsyncthreshold und Plots siehe BAT_NOMA_Receiver.py.
5. Synchronisation
- Zeitsynchronisation: passende Sampling-Phasen bzw. Symboltakte finden, oft fein nach der Grobposition aus der Präambel.
- Downsampling: von mehreren Samples pro Symbol auf ein Sample pro Symbol (nach Filterung und Taktanpassung).
- Frequenzsynchronisation: Schätzung und Korrektur des Trägerfrequenzoffsets, damit die Konstellation nicht dauernd „dreht“.
6. Phasenkorrektur (optional, für NOMA oft wichtig)
Bei längeren Blöcken oder Restfehlern kann eine PLL (Phase Locked Loop) oder ein vergleichbares Tracking die Phasendrift ausgleichen und die Symbolentscheidung stabilisieren.
7. Demodulation
Komplexe Samples werden auf Symbole abgebildet, Symbole auf Bits – zunächst für das stärkste (dominante) Nutzersignal.
Vorbereitung für die SIC
Nach der Demodulation folgt ein kritischer Schritt: Das Nutzersignal wird rekonstruiert, so wie es – idealisiert – vor der Überlagerung aussah.
Rekonstruktion
- Symbole → komplexe Konstellationspunkte (inkl. ggf. Null-Symbol)
- Upsampling auf die Sample-Rate der Pulsformung
- Faltung mit der gleichen Impulsform wie im Sender (RRC)
Ziel: ein möglichst genaues, rauschfreies Referenzsignal des decodierten starken Nutzers im Basisband.
Die Rekonstruktion des decodierten Nutzers erfolgt mit calculated_original_signal (Auszug aus BAT_NOMA_Receiver.py):
def calculated_original_signal(estimated_symbol):
estimated_Signal = np.zeros(len(estimated_symbol[0:464]), dtype='complex_')
for m in np.arange(len(estimated_symbol[0:464])):
if estimated_symbol[m] == 0:
estimated_Signal[m] = np.cdouble(complex(1, 1))
if estimated_symbol[m] == 1:
estimated_Signal[m] = np.cdouble(complex(-1, 1))
if estimated_symbol[m] == 2:
estimated_Signal[m] = np.cdouble(complex(-1, -1))
if estimated_symbol[m] == 3:
estimated_Signal[m] = np.cdouble(complex(1, -1))
sub_signal = np.zeros(len(estimated_Signal) * 4, dtype=np.complex64)
j = 0
while j <= len(sub_signal) - 1:
if j % 4 == 0:
sub_signal[j] = estimated_Signal[int(j / 4)]
else:
sub_signal[j] = 0
j = j + 1
sub_signal = np.convolve(sub_signal, rcos)
return np.array(sub_signal, dtype=np.cdouble)Anschliessend folgen Phasenkorrektur mit gespeicherter PLL-Referenz, Skalierung mit gleitendem Mittel und Subtraktion (SIC-Block im gleichen File).
Skalierung an die empfangene Amplitude
Die Rekonstruktion muss in Amplitude und Phase zum tatsächlich empfangenen Anteil passen. Schwankt die Amplitude, hilft z. B. ein gleitender Mittelwert der Symbol-Maxima (oder eine Kanalschätzung), den Skalierungsfaktor robust zu setzen.
Zentraler Punkt für die Subtraktion
Für die SIC wird typischerweise nicht das rohe ADC-Signal „blind“ verwendet, sondern die Kette nach Matched Filter und Synchronisation – dort ist die Form des starken Nutzers am besten mit dem decodierten Symbolstrom in Einklang zu bringen.
Ohne diese Übereinstimmung bleiben nach der Subtraktion zu grosse Restanteile; das zweite Signal bleibt verborgen – NOMA bricht praktisch zusammen.
Warum dieser Aufwand nötig ist
Ohne genaue Schätzung von Takt, Frequenz, Phase und Amplitude passt die Rekonstruktion nicht exakt auf den überlagerten Empfang – die Subtraktion wird fehlerhaft, und Fehler pflanzen sich auf alle folgenden SIC-Stufen fort.
Kapitel 5 – Sukzessive Interferenzunterdrückung (SIC) im Detail
Die sukzessive Interferenzunterdrückung (Successive Interference Cancellation, SIC) ist der zentrale Mechanismus, der NOMA in der Praxis erst handhabbar macht.
Während im vorherigen Kapitel die Signalverarbeitung vorbereitet wurde, erfolgt hier die eigentliche Trennung der überlagerten Nutzeranteile.
Ziel: ein überlagertes Empfangssignal in seine ursprünglichen Einzelkomponenten zerlegen bzw. nacheinander so weit zu isolieren, dass schwächere Nutzer demoduliert werden können.
Grundprinzip
Das empfangene Signal (vereinfacht für zwei Nutzer im Basisband) lässt sich schreiben als
\[ r(t) = s_1(t) + s_2(t) + n(t) \]
- \(s_1(t)\): dominanter Nutzerbeitrag
- \(s_2(t)\): schwächerer Nutzerbeitrag
- \(n(t)\): Rauschen (und ggf. modellierte Reststörungen)
Idee von SIC: starken Anteil \(s_1\) zuverlässig schätzen und demodulieren → rekonstruieren → vom Empfang subtrahieren → dadurch wird \(s_2\) „sichtbarer“ für die nächste Demodulationsrunde.
Algorithmischer Ablauf
Schritt 1 – Detektion des dominanten Signals
Nach der Vorverarbeitung aus Kapitel 4 ist das Signal synchronisiert, der Frequenzoffset ist grob korrigiert, und es liegt nach Matched Filter eine geeignete Form für die Symbolentscheidung vor.
Dann kann das stärkste Signal zunächst wie ein Einzelnutzersystem demoduliert werden.
Wichtig: Der schwächere Nutzer wirkt hier wie zusätzliches Rauschen/Interferenz. Die Bitfehlerrate bleibt dennoch niedrig, solange das Leistungsverhältnis und die Kanalqualität passen.
Schritt 2 – Symbolbasierte Rekonstruktion
Die demodulierten Symbole werden auf komplexe Konstellationspunkte abgebildet. Beispiel QPSK (wie im Aufbau verwendet; Gray-Mapping typisch):
- \(00 \rightarrow 1 + j\)
- \(01 \rightarrow -1 + j\)
- \(11 \rightarrow -1 - j\)
- \(10 \rightarrow 1 - j\)
(Bei erweitertem Alphabet aus Kapitel 4 kommt ggf. das Null-Symbol \((0,0)\) hinzu.)
Ergebnis: eine diskrete Symbolfolge im I/Q-Raum.
Schritt 3 – Upsampling
Die Symbolfolge wird wieder auf die Sample-Rate der Pulsformung gebracht: pro Symbol mehrere Samples, dazwischen (idealisiert) Nullen einfügen. Das ist nötig, um die kontinuierliche Sendepulsform erneut aufzubauen.
Schritt 4 – Pulsformung (Rekonstruktion des Sendesignals)
Das upsamplete Symbolsignal wird mit der Impulsform gefaltet (diskret: Faltungssumme), wie im Sender:
\[ s_{\mathrm{rek}}(t) = s_{\mathrm{sym}}(t) \ast h(t) \]
Dabei ist \(h(t)\) die Impulsantwort des Root-Raised-Cosine-Filters (Senderseite). Ergebnis: eine Approximation des störfreien Sendesignals des starken Nutzers im Basisband – bis auf Skalierung und Kanalphase, die im nächsten Schritt angeglichen werden.
Schritt 5 – Kritisch: Skalierung
Hier unterscheidet sich die Praxis oft stark von einer naiven Theorie.
Naiv (schlecht in der Praxis): Skalierung nur nach der Maximalamplitude des Roh-Empfangssignals – problematisch wegen Rauschen, Überlagerung und SDR-/AGC-Schwankungen.
Praxisnah: Skalierung z. B. über einen gleitenden Mittelwert der Symbol-Maxima (oder eine robuste Kanalamplitudenschätzung). Vorteile: weniger Ausreisser durch Rauschen, stabilere Anpassung bei NOMA-Überlagerung, dynamische Nachführung.
Schritt 6 – Subtraktion
Der eigentliche SIC-Schritt im Basisband:
\[ r_{\mathrm{neu}}(t) = r(t) - \alpha \cdot s_{\mathrm{rek}}(t) \]
\(\alpha\) fasst Amplituden- und Phasenanpassung zusammen (ggf. komplex, je nach Implementierung).
Wichtig: \(r(t)\) ist hier das vorverarbeitete Signal – gefiltert und synchronisiert, nicht der ungefilterte Roh-ADC-Strom. So stimmen Zeitbasis und Pulsform zwischen Empfang und Rekonstruktion überein.
Ergebnis: der dominante Nutzeranteil wird weitgehend entfernt; der schwächere tritt im Restsignal hervor.
Im Notebook wird nach Phasenkorrektur von whole_rx die Rekonstruktion Sic_Signal mit einem gleitenden Mittel der Betragsmaxima skaliert und vom Ausschnitt subtrahiert; anschliessend wird der Frequenzoffset für den zweiten Nutzer mitkorrigiert (Auszug aus BAT_NOMA_Receiver.py):
Sic_Signal = calculated_original_signal(estsymb)
for o in np.arange(whole_rx.shape[0] - 50 - 48):
whole_rx[o + 50] *= np.exp(-1j * refph[int(o / 4)])
start_value = (np.mean(np.abs(rx[i0:i0 + 64 * 4:4].real)))
for i in np.arange(0, 1914):
new_value = (39 * start_value + np.abs(whole_rx[int(i / 4) + 40].real)) / 40
Sic_Signal[i + 40] = Sic_Signal[i + 40] * start_value * 1.1
start_value = new_value
rx[i0 - 50:i0 + 464 * 4 + 48] = whole_rx[0:464 * 4 + 50 + 48] - Sic_Signal
rx[i0:i0 + 464 * 4] = rx[i0:i0 + 464 * 4] * np.exp(
-1j * (-1 * ph0) - 2j * np.pi * ((-1) * f0) / fft_len * np.arange(i0, i0 + 4 * symbols.shape[0]))Die Variablen i0, ph0, f0, estsymb, refph stammen aus der Präambel-/PLL-Kette im selben Skript.
Problem: Fehlerverstärkung
Die Subtraktion ist nie perfekt. Ursachen u. a.:
- Rauschen
- Phasen- und Frequenzrestfehler
- ungenaues \(\alpha\) bzw. falsche Kanalschätzung
- Synchronisationsfehler
Folge: Rest-Artefakte im Signal – sie können das zweite Nutzersignal stark stören und die Demodulation nach der ersten SIC-Stufe verschlechtern.
Erweiterte Optimierungen (Engineering-Learnings)
1. Konsequent das aufbereitete Signal nutzen
Statt am direkt empfangenen Rohsignal zu subtrahieren, wird die Kette gefiltert, takt- und frequenzkorrigiert verwendet – das ist oft der Unterschied zwischen „SIC wirkt“ und „SIC versagt“.
2. Phasenregelkreis (PLL)
Problem: Phasendrift → Rekonstruktion passt nicht exakt auf den Empfang.
Lösung: PLL oder vergleichbares Tracking für laufende Phasenkorrektur. Effekt: bessere Übereinstimmung und spürbar bessere Subtraktion über längere Pakete.
3. Frequenzoffset bei mehreren Nutzern
Problem: unterschiedliche Sender können unterschiedliche Restoffsets erzeugen; nach Demodulation des ersten Nutzers kann das verbleibende Signal noch einen falschen Offset tragen.
Lösung: nach der ersten SIC-Stufe Offset neu schätzen und das Restsignal erneut synchronisieren, bevor der zweite Nutzer demoduliert wird.
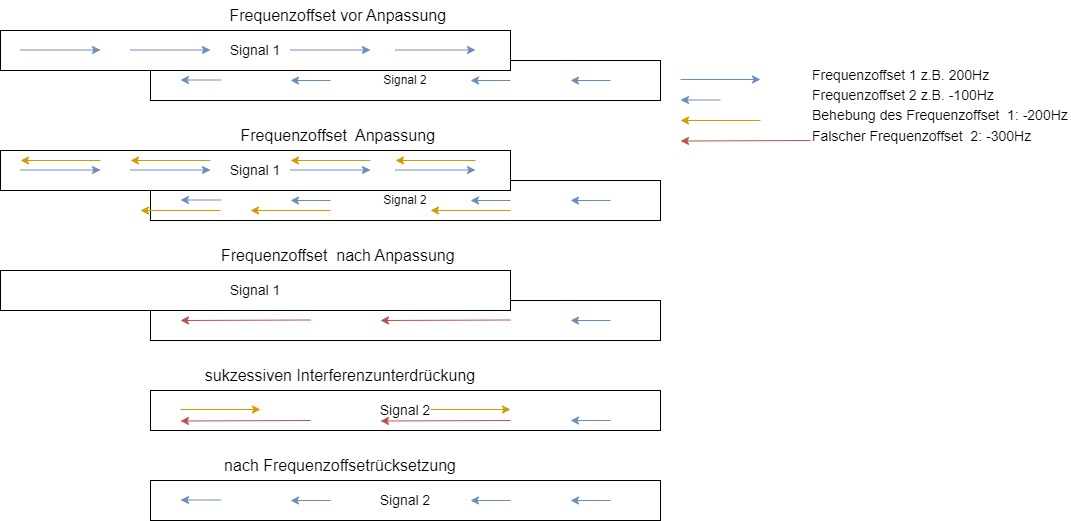
4. Signal-Zusammenführung im Gesamtkontext
Wird nur ein Zeitausschnitt oder ein Teilpfad bearbeitet, muss das Ergebnis wieder konsistent ins Gesamtprocessing eingebettet werden – relevant, wenn mehr als zwei Nutzer oder mehrere Bursts nacheinander verarbeitet werden.
Ergebnis der Optimierungen
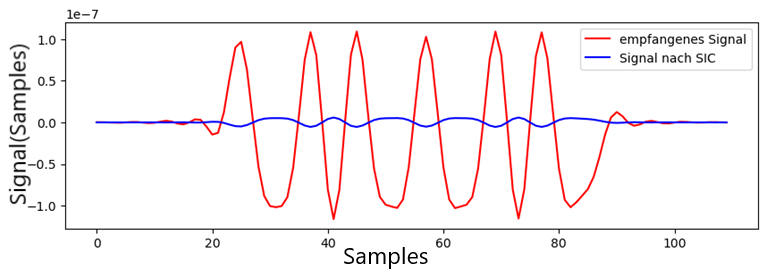
In deinem Aufbau führten diese Massnahmen zu einer deutlichen Reduktion der dominanten Interferenz (grob im Bereich eines Faktors um 6 bei der messbaren Signalreduktion) und zu einer spürbar besseren Trennung – ohne diese Schritte war SIC praktisch nicht brauchbar.
Hinweis: Der genaue Faktor hängt von SNR, Leistungsverhältnis und Implementierung ab; entscheidend ist das relative Verbesserungsbild.
Grenzen von SIC
SIC ist empfindlich gegenüber:
- falschem Leistungsverhältnis
- hohem Rauschen
- ungenauer Synchronisation
Kritischer Punkt: Wird das erste Signal falsch dekodiert, ist die Rekonstruktion falsch, die Subtraktion verschlechtert das Restsignal, und das zweite Signal wird praktisch unbrauchbar – klassische Fehlerfortpflanzung.
Zentrale Erkenntnis
SIC ist kein einfaches „Abziehen“ eines Signals. Es ist ein hochpräziser, iterativ wirkender Prozess aus Demodulation, Rekonstruktion, Amplituden-/Phasenanpassung und Subtraktion – jeder Fehler belastet alle folgenden Stufen.
Kapitel 6 – Durchführung des NOMA-Verfahrens im realen System
Nach der detaillierten Betrachtung von Signalverarbeitung und SIC beschreibt dieses Kapitel, wie das NOMA-Verfahren in einem konkreten Laboraufbau umgesetzt und getestet wurde.
Schwerpunkte: echte Signalüberlagerung, Detektion beider Nutzer, Anwendung von SIC und bewertbare Rekonstruktion des schwächeren Signals.

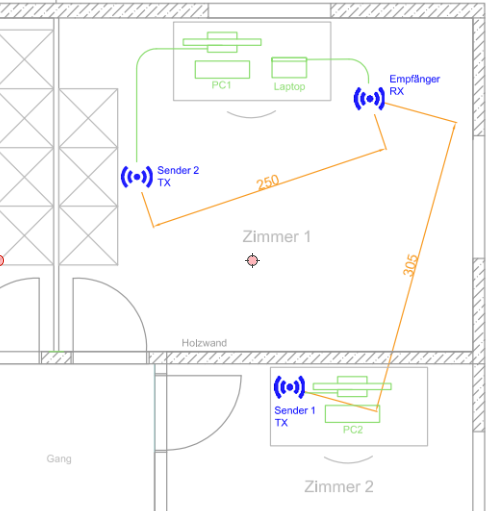
Versuchsaufbau
Das System besteht aus:
- 2 Sendern (je ein SDR)
- 1 Empfänger (SDR)
- Antennen mit geringem Abstand (Grössenordnung wenige Meter)
Szenario (Power Domain):
- Sender 1 → höhere Sendeleistung (simuliert u. a. „weiter entfernt“ bzw. schwächerer Kanal)
- Sender 2 → geringere Sendeleistung (näher / stärkerer Kanal)
Effekt: Am Empfänger entsteht ein NOMA-typisches Überlagerungsbild mit unterschiedlicher Dominanz der Nutzeranteile.
Das folgende Bild zeigt den Laboraufbau mit Antennen und SDR-Hardware.
Herausforderung: Gleichzeitige Übertragung
Zwei Signale wirklich gleichzeitig auszusenden ist in der Praxis anspruchsvoller als es klingt.
Steuerung erfolgte über TCP – das bringt kleine, aber variable Latenzen. Zusätzlich sind die Bursts sehr kurz (Grössenordnung Millisekunden), sodass schon geringe Jitter merkbar sind.
Ziel im Versuch: möglichst starke zeitliche Überlagerung der beiden Bursts im Empfang, trotz nicht idealer Triggerung.
Umgesetzt wurde das so, dass ein kleines Steuerskript (oder ein Block im Flowgraph) an beide Sender nacheinander oder parallel Kommandos schickt („Sende jetzt“). Wegen TCP-Buffering und OS-Scheduling ist die absolute Zeitlage der beiden HF-Bursts nicht deterministisch; deshalb ist die Präambel-Korrelation am Empfänger entscheidend, um jeden Beitrag im gemischten Signal wiederzufinden – und nach der SIC erneut für Nutzer 2.
clientSocket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
clientSocket2 = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
clientSocket2.connect(("192.168.1.153", 9092)) # zweiter PC
clientSocket.connect(("localhost", 9092))
while i < 1:
time.sleep(0.2)
clientSocket2.send(send_zeros)
clientSocket2.send(frame)
clientSocket2.send(send_zeros)
time.sleep(0.01)
clientSocket.send(send_zeros)
clientSocket.send(frame)
clientSocket.send(send_zeros)IP und Ports an die eigene Installation anpassen; frame enthält nach adjust_data angepasste Nutzbytes und Null-Symbol-Füllung.
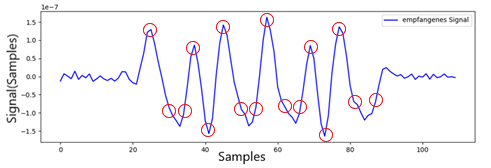
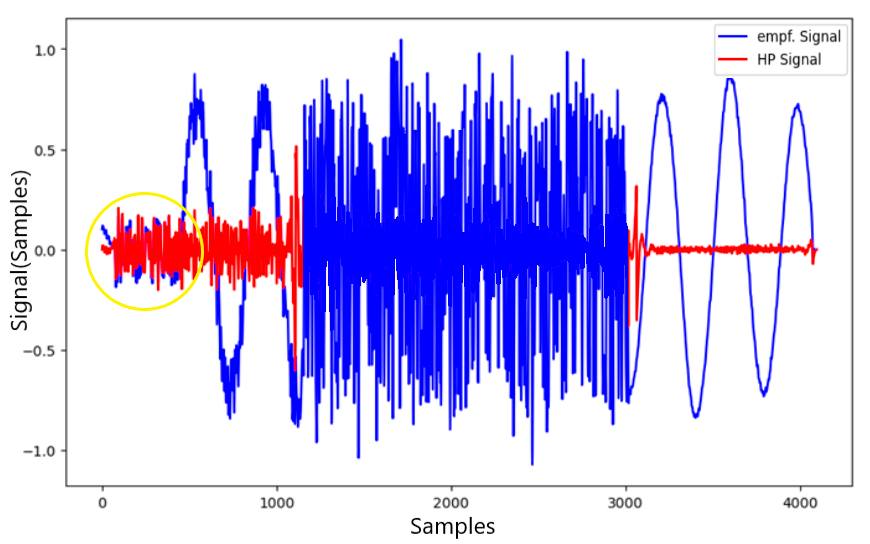
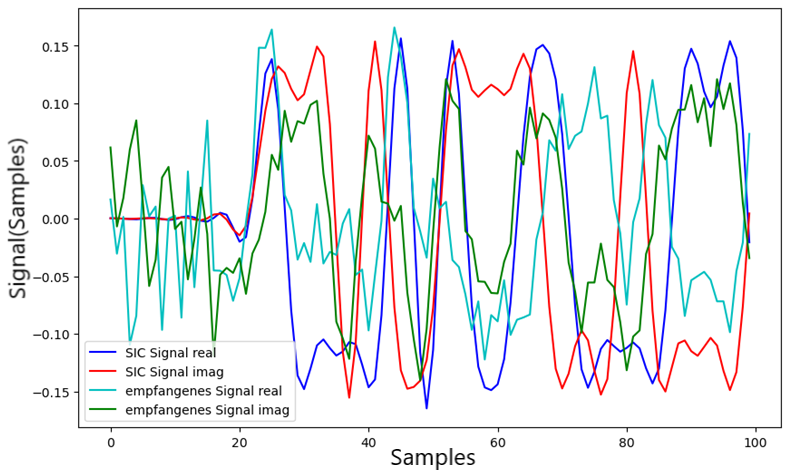
Empfang des überlagerten Signals
Das empfangene Basisbandsignal zeigt erwartungsgemäss:
- keine konstante Einhüllende,
- sichtbare Schwankungen,
- keine „saubere“ Einzelnutzer-Symbolstruktur im Rohverlauf.
Deutung: mehrere Nutzerbeiträge überlagern sich; genau dieses Signal ist die Ausgangsbasis für Präambel-Suche und SIC.
Schritt 1 – Detektion des ersten Signals (Präambel)
Wie in Kapitel 4/5: Kreuzkorrelation mit der bekannten Präambel.
Ergebnis: ausgeprägter Peak → Start des ersten nutzbaren Segments bzw. des zuerst ausgewerteten Bursts identifiziert.
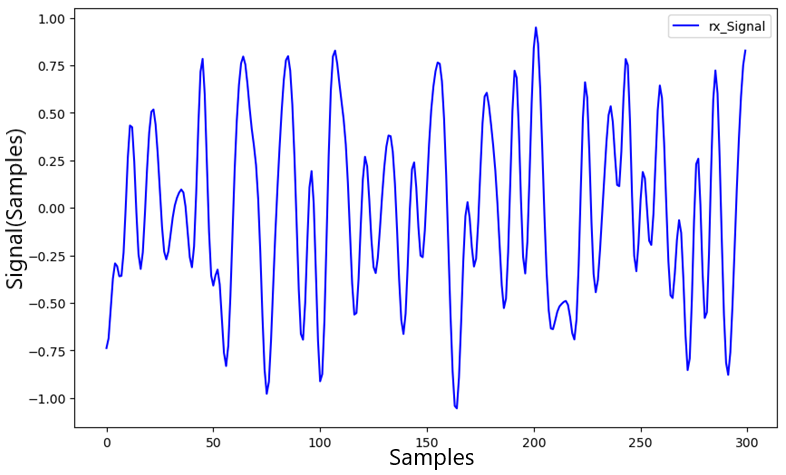
Signalinterpretation im Zeitverlauf
Im beobachteten Verlauf: die ersten Samples wirken relativ ruhiger, später nimmt die „Zerrissenheit“ zu.
Interpretation: zu Beginn dominiert faktisch ein Nutzeranteil stärker; im weiteren Verlauf wächst der Einfluss der Überlagerung mit dem zweiten Signal – konsistent mit leicht versetzten oder überlappenden Bursts.
Schritt 2 – Auswertung des dominanten Signals
Das stärkere Signal wird zuerst demoduliert.
Beobachtungen: trotz Überlagerung weiterhin gut auswertbar; die Symbolphasen bleiben weitgehend stabil.
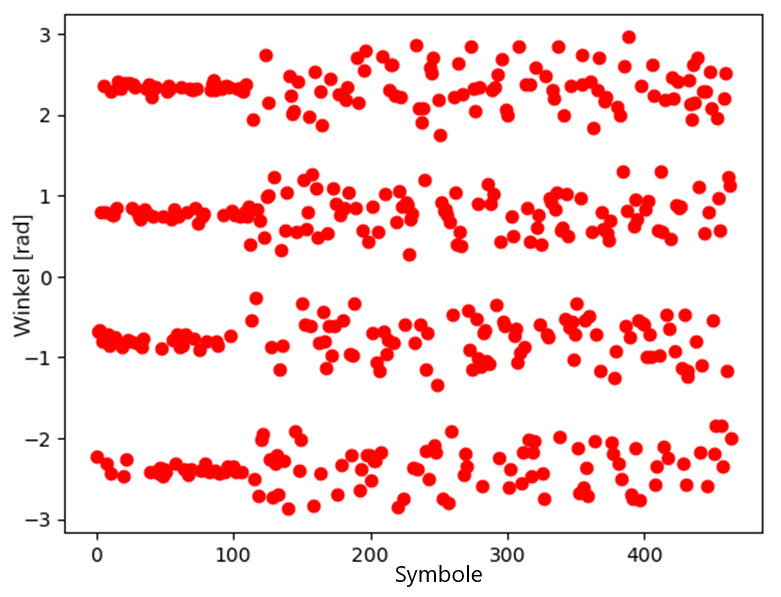
Geschätzte Bitfehlerrate (Versuch, Grössenordnung): sehr niedrig, etwa \(5 \cdot 10^{-3}\) (0,5 % der Bits fehlerhaft) – abhängig von SNR und exakter Burstlage.
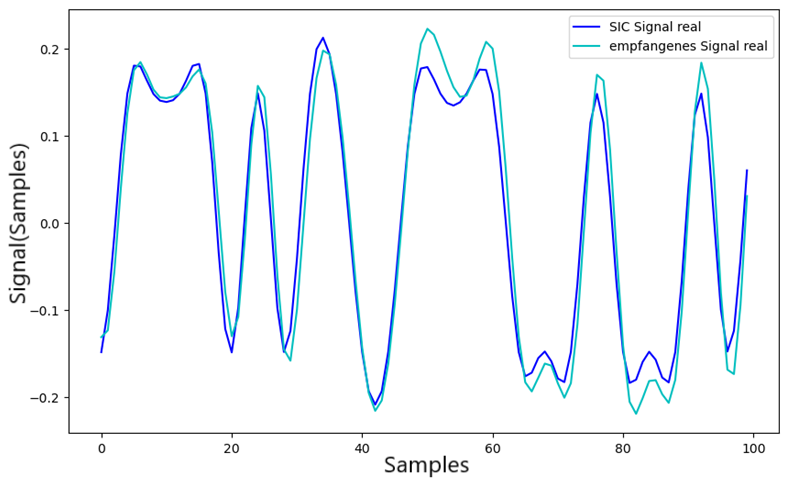
Schritt 3 – Anwendung von SIC
Das dominierende Signal wird entfernt nach dem etablierten Schema: rekonstruieren (Symbole → Pulsform), skalieren, vom vorverarbeiteten Empfangssignal subtrahieren.
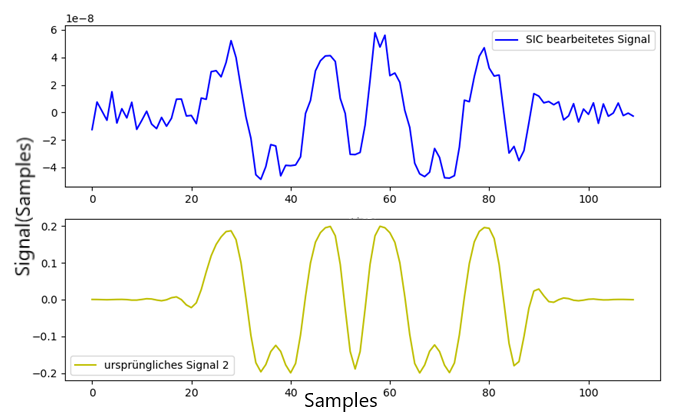
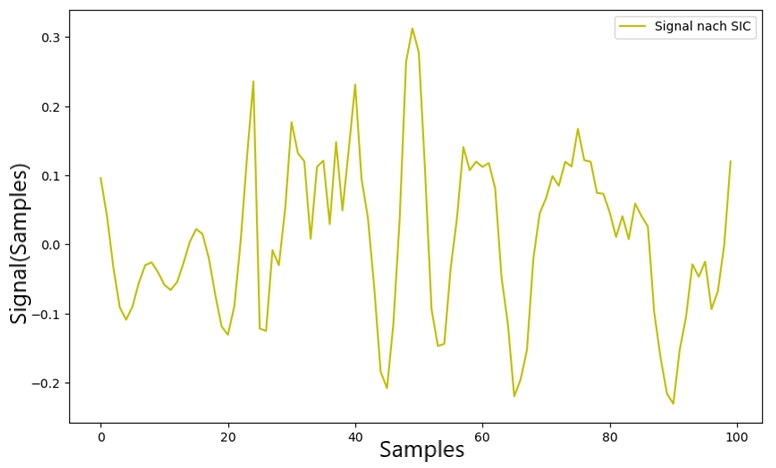
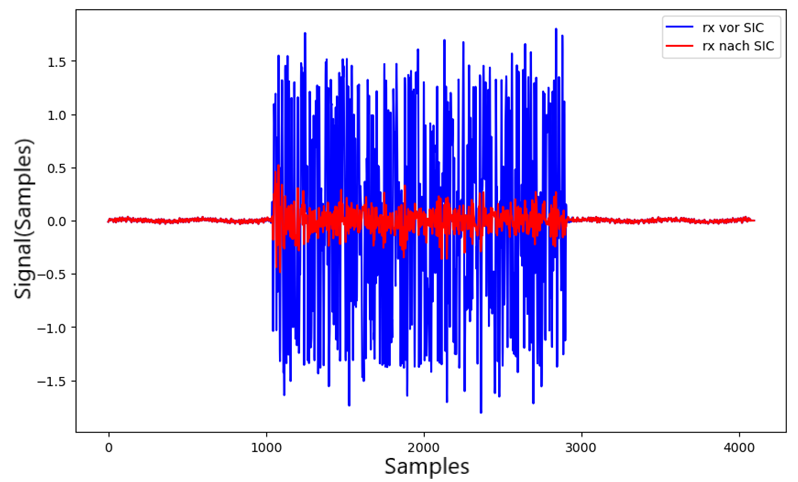
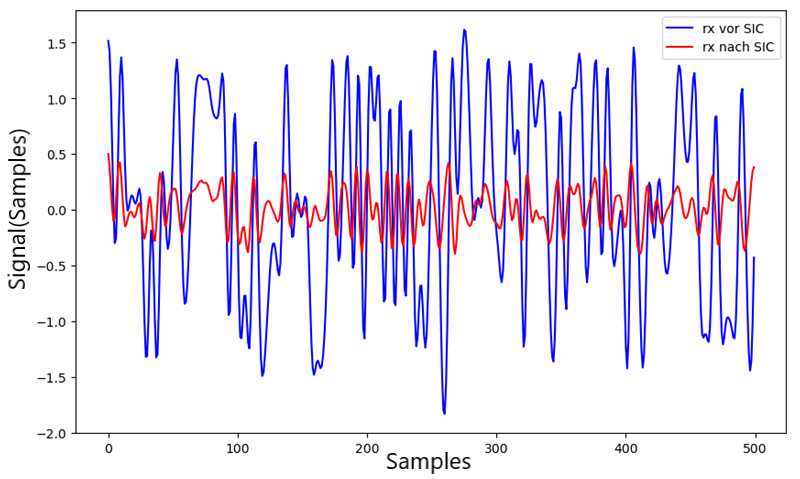
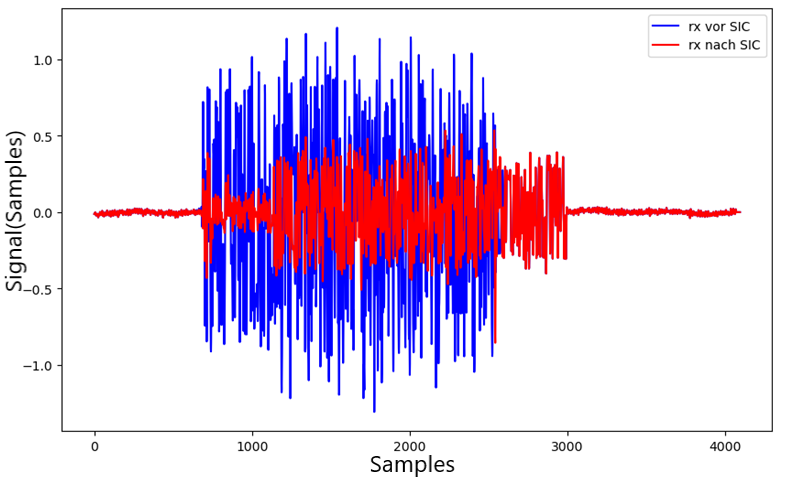
Effekt der Subtraktion
Nach der Subtraktion: die Amplitude des verbleibenden Signals sinkt deutlich, die Struktur ändert sich.
Entscheidend: das zweite Nutzersignal tritt sichtbarer hervor – es war vorher im dominanten Anteil „versteckt“.
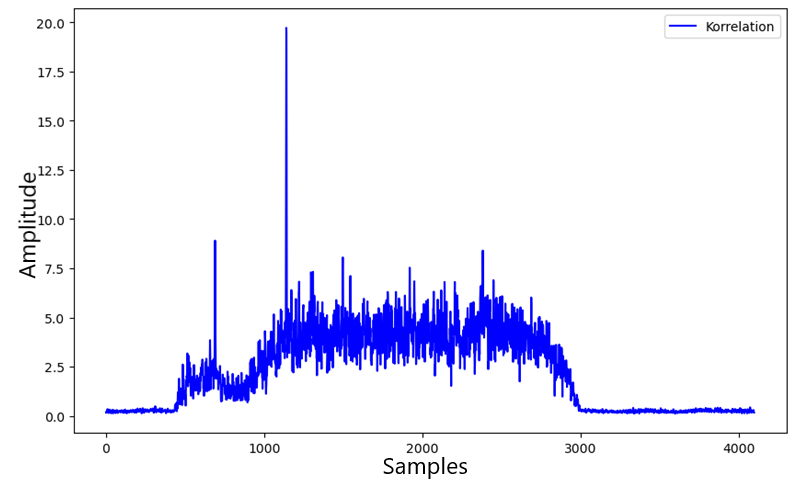
Schritt 4 – Detektion des zweiten Signals
Erneut Kreuzkorrelation mit der Präambel auf dem Restsignal.
Beobachtung: ein neuer Peak zeigt sich; der Anteil des ersten Nutzers ist im Rest stark reduziert.
Folgerung: Nachweis, dass die SIC-Kette in diesem Aufbau wirkt – der zweite Nutzer wird wieder auffindbar.
Schritt 5 – Auswertung des zweiten Signals
Das schwächere Signal wird demoduliert.
Beobachtungen: mehr Rauschen, weniger stabile Symbolwinkel als beim ersten Nutzer.
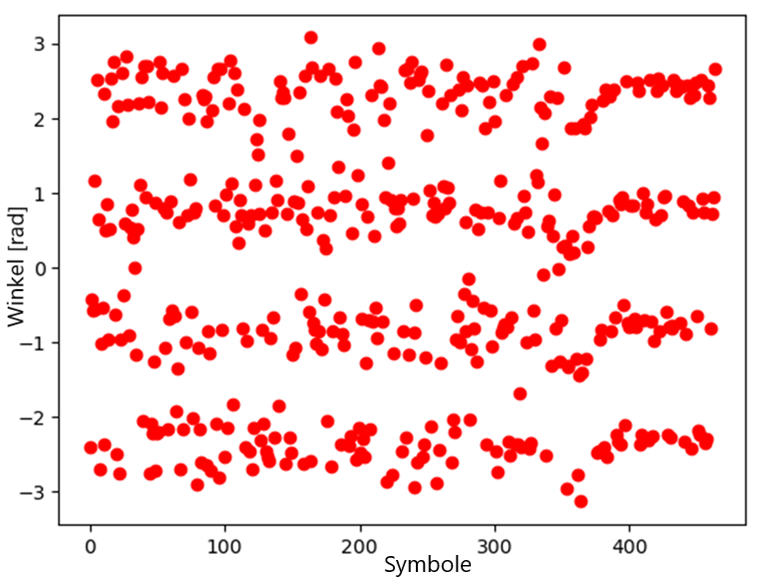
Geschätzte Bitfehlerrate: höher, Grössenordnung etwa \(10^{-2}\) (1 %) – erwartbar durch Restinterferenz nach SIC und geringeren effektiven SNR.
Warum das zweite Signal schwieriger ist
- Restfehler aus unvollständiger Subtraktion
- nicht perfekte Überlagerung / Timing im Versuch
- stärkerer Einfluss von Rauschen auf den schwächeren Anteil
Das ist typisches NOMA-Verhalten: der zweite Stufe bleibt immer die kritischere.
Gesamtbewertung des Versuchs
- Erfolg: beide Signale konnten detektiert und getrennt ausgewertet werden.
- Erfolg: die Überlagerung wurde durch SIC in diesem Setup praktisch nutzbar getrennt.
- Einschränkung: die Qualität des zweiten Nutzers bleibt deutlich hinter dem ersten zurück – konsistent mit Theorie und SIC-Fehlerfortpflanzung.
Wichtige Erkenntnisse aus der Praxis
- NOMA funktioniert real – nicht nur in Simulation; echte überlagerte SDR-Signale liessen sich in diesem Aufbau trennen.
- Leistungsverhältnis: Zu grosser Abstand → das schwache Signal geht unter; zu kleiner Abstand → der erste Nutzer ist nicht mehr sauber dominant und die erste Demodulation leidet.
- Synchronisation: kleine Timingfehler haben grosse Wirkung – besonders bei kurzen Paketen.
- SIC als Engpass: die Güte der Subtraktion bestimmt massgeblich, ob der zweite Nutzer noch brauchbar ist.
Engineering-Learnings
Dieses Kapitel fasst zusammen: Theorie und Praxis sind nicht identisch.
Typische reale Effekte im Versuch:
- Jitter und Latenz durch TCP-Steuerung
- instabile Amplituden (AGC, Hardware, Übersteuerung)
- nie perfekt gleichzeitige und perfekt überlappende Bursts
- zusätzliche Hardware-Ungenauigkeiten (Offset, Phase)
Genau deshalb waren die in Kapitel 4 und 5 beschriebenen Schritte – Filterung, Sync, Skalierung, PLL – keine „Nice-to-have“-Optionen, sondern Voraussetzung, um SIC stabil zu machen.
Kapitel 7 – Auswertung und Performance des Systems
Nach der Durchführung des NOMA-Verfahrens im Versuchsaufbau stellt sich die zentrale Frage:
Wie zuverlässig funktioniert die Signaltrennung in der Praxis?
Zur Bewertung werden vor allem zwei Grössen herangezogen:
- Bitfehlerrate (BER)
- Abhängigkeit vom Leistungsverhältnis der Nutzer
Bitfehlerrate (BER) als zentrale Kennzahl
Die Bitfehlerrate beschreibt den Anteil falsch übertragener Bits:
\[ \mathrm{BER} = \frac{\text{Anzahl fehlerhafter Bits}}{\text{Gesamtanzahl Bits}} \]
Je kleiner die BER, desto besser die Übertragung bzw. Dekodierung unter den gewählten Bedingungen.
Im Empfängernotebook wird die BER über die Symbolabweichung von den referenzierten symbols gebildet (Auszug aus BAT_NOMA_Receiver.py):
error_sum = 0
for l in np.arange(symbol_len):
error = ((estsymb[l] - symbols[l] + 8) % 4)
if error == 3:
error = 1
error_sum = error_sum + error
BER = error_sum / (symbol_len * 2)Pakete mit BER unter 0,1 zählen als korrekt empfangen (wie in der Auswertung beschrieben).
Ergebnisse für das erste Signal (dominant)
Das stärkere Signal wird direkt aus dem überlagerten Empfang dekodiert.
Beobachtungen: sehr stabile Symbolerkennung; der zweite Nutzer stört nur moderat; niedrige Fehlerrate.
Typische Werte im Versuch: \(\mathrm{BER} < 0{,}01\) (unter 1 %).
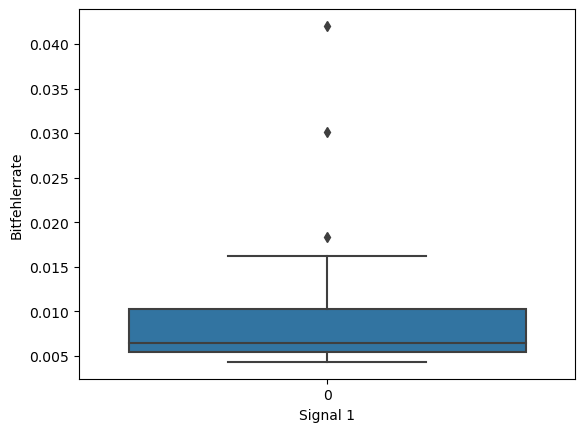
Interpretation (Signal 1)
Das dominante Signal ist robust, weil es die grösste effektive Amplitude trägt und der zweite Nutzer in der ersten Stufe vor allem wie zusätzliche Störung wirkt.
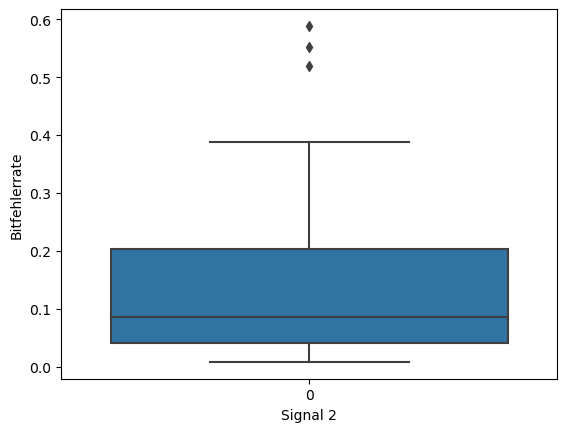
Ergebnisse für das zweite Signal (nach SIC)
Das schwächere Signal wird erst nach der Subtraktion des dominanten Nutzers ausgewertet.
Beobachtungen: deutlich mehr Streuung, höhere Empfindlichkeit gegenüber Parametertoleranzen, stärkere Abhängigkeit von SIC-Qualität und Rauschen.
Typische Werte: \(\mathrm{BER}\) grob im Bereich \(0{,}01\) bis \(0{,}1\) – stark vom Leistungsverhältnis und von der Burstqualität abhängig.
Ursachen der höheren Fehlerquote (Signal 2)
- unvollständige oder ungenaue Subtraktion (SIC)
- Rest-Artefakte vom ersten Signal
- Rauschen
- Synchronisationsrestfehler
Das ist der Hauptlimitierungsfaktor von NOMA in diesem Aufbau: die zweite Stufe trägt fast die gesamte „Brüchigkeit“.
Einfluss des Leistungsverhältnisses
Der wichtigste Steuerparameter im Versuch ist das Verhältnis der Signalstärken bzw. empfangenen Leistungen. Mit \(P_1\) für den dominanten Nutzer und \(P_2\) für den schwächeren Nutzer (jeweils am Empfang gewertet) wird das Verhältnis
\[ R = \frac{P_2}{P_1} \]
betrachtet (konkrete Definition entspricht der Messprotokollierung im Labor).
Beobachtung aus den Messungen
Es zeigt sich ein klares Optimum: im Versuch lag das günstigste Verhältnis \(R\) grob bei \(0{,}4\) bis \(0{,}5\).
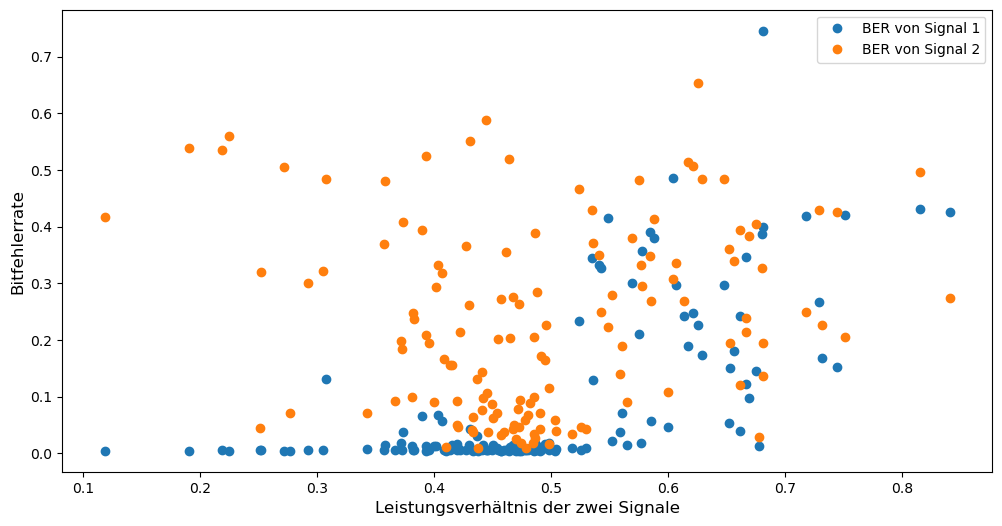
Verhalten ausserhalb des Optimums
- Wenn Nutzer 1 zu dominant ist (\(R\) zu klein): Nutzer 2 wird stark überdeckt und ist nach SIC kaum rekonstruierbar.
- Wenn Nutzer 1 zu schwach ist (\(R\) zu gross): die erste Demodulation wird fehleranfällig, die SIC-Kette bricht zusammen – Fehler propagieren.
Interpretation
NOMA funktioniert in diesem System nur in einem vergleichsweise engen Leistungsfenster – eine der wichtigsten praktischen Erkenntnisse.
Verteilung der Bitfehlerraten
Im optimalen Bereich für \(R\):
- Signal 1: sehr stabil, kaum Ausreisser, durchgehend gut dekodierbar.
- Signal 2: grössere Streuung – einzelne Bursts deutlich besser, andere deutlich schlechter.
Median (Signal 2, im ausgewerteten Datensatz): etwa \(\mathrm{BER} \approx 0{,}08\).
Empfangswahrscheinlichkeit / Erfolgsquote
Zusätzlich wurde definiert, wann ein Burst als „korrekt empfangen“ gilt:
Kriterium: \(\mathrm{BER} < 0{,}1\).
Ergebnisse (Versuch):
- über alle Einstellungen: rund 34 % der Fälle mit erfolgreicher Rekonstruktion (nach obiger Definition),
- im optimalen Leistungsbereich: rund 60 %.
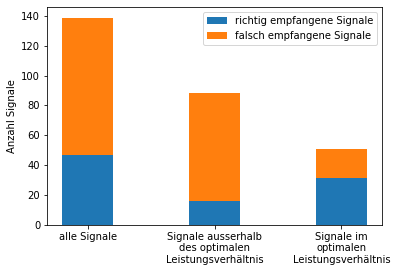
Interpretation
Das System zeigt die erwartete NOMA-Funktion, ist aber noch nicht ausreichend zuverlässig für harte IoT-Anforderungen – stark abhängig von Leistungsverhältnis und Signalqualität.
Hauptlimitierungen des Systems
- Instabiles Leistungsverhältnis: SDR/AGC liefern keine strikt konstanten Amplituden; Drift über Zeit und zwischen Bursts.
- Fehler in der SIC: Subtraktion nie perfekt; Restfehler belasten die zweite Stufe.
- Rauschen und Kanal: wirkt auf beide Nutzer; für den schwachen besonders kritisch.
- Synchronisationsfehler: Timing und Frequenz nie ideal – kleine Abweichungen, grosse Wirkung bei kurzen Paketen.
Zentrale Erkenntnisse
- NOMA ist stark parameterabhängig – ohne passendes Setup sinkt die Performance schnell.
- SIC ist der kritische Punkt – die Qualität der Subtraktion bestimmt massgeblich den Erfolg.
- Das zweite Signal ist immer schwieriger – bedingt durch geringere effektive Leistung und höhere Störeinflüsse nach der ersten Stufe.
Was für ein robusteres System fehlt
Damit NOMA in ähnlichen Szenarien deutlich zuverlässiger wird, wären u. a. sinnvoll:
- Fehlerkorrektur (FEC) und ggf. Interleaving
- adaptive Leistungs- oder Ratenregelung (Anpassung von \(R\) und Datenrate)
- verbesserte Synchronisation (präzisere Triggerung, ggf. gemeinsame Referenz statt TCP-Jitter)
- für Forschungsaufbauten: lernbasierte oder iterativ verfeinerte SIC zur besseren Kanal- und Restinterferenzschätzung
Fazit dieses Kapitels
NOMA funktioniert im Versuch – aber nicht trivial.
- Im optimalen Leistungsbereich sind gute Ergebnisse erreichbar.
- Deutliche praktische Grenzen zeigen sich durch SIC-Restfehler, Rauschen und Synchronisation.
- Die Performance hängt stark von den Systemparametern ab – insbesondere vom Verhältnis \(P_2/P_1\) und von der Güte der ersten Demodulation.
Kapitel 8 – Fazit und Ausblick
Dieses Kapitel fasst die Ergebnisse aus dem Laboraufbau und der Messauswertung zusammen und ordnet sie in einen technischen Ausblick ein. Zusätzliche Messgrafiken gibt es hier bewusst nicht; die zentralen Kennlinien stehen in Kapitel 7.
Zusammenfassung
Der Artikel zeigt, wie sich Non-Orthogonal Multiple Access (NOMA) praktisch mit einem Software Defined Radio (SDR) umsetzen und im Labor erproben lässt.
Zentrale Idee: Mehrere Nutzer senden gleichzeitig im selben Frequenzband; die Trennung erfolgt im Empfänger durch Signalverarbeitung – vor allem durch sukzessive Interferenzunterdrückung (SIC).
Was die Umsetzung bestätigt hat:
- Überlagerte Signale lassen sich tatsächlich in nutzbare Einzelanteile zurückführen.
- SIC funktioniert in realen SDR-Ketten, wenn Vorverarbeitung und Skalierung stimmen.
- Ein zweites, schwächeres Signal kann nach Subtraktion des dominanten Nutzers sichtbar gemacht und demoduliert werden.
Fazit: NOMA ist damit nicht nur ein theoretisches Konzept, sondern in einem kontrollierten Aufbau praktisch realisierbar.
Realität versus Theorie
Eine zentrale Erkenntnis aus dem Versuch: Die Theorie wirkt einfacher als die Praxis.
Das Grundprinzip von NOMA ist schnell erklärt; die reale Kette zeigt jedoch:
- Signale sind verrauscht und nicht ideal.
- Amplituden sind nicht konstant (AGC, Hardware, Übersteuerung).
- Frequenz- und Phasenfehler treten stets auf.
- Synchronisation ist nie perfekt – besonders bei kurzen Bursts und externer Triggerung.
Konsequenz: SIC gelingt nur, wenn die gesamte Signalverarbeitung (Filter, Sync, Phase, Amplitude) sehr präzise aufeinander abgestimmt ist.
Wichtigste technische Erkenntnisse
- Leistungsverhältnis: Es bestimmt den Erfolg – zu grosser Unterschied verschwindet der schwache Nutzer; zu kleiner Unterschied lässt den ersten nicht sauber detektieren. Es gibt ein enges optimales Fenster (siehe Kapitel 7).
- SIC als Kern: Die Qualität der Subtraktion entscheidet über fast alles; kleine Fehler in der Rekonstruktion haben grosse Wirkung auf das zweite Signal. SIC ist der zentrale Engpass.
- Fokus auf DSP: Das Problem ist weniger die Funkübertragung allein als die Signalverarbeitung danach – Filterung, Synchronisation, Phasenkorrektur und Skalierung machen NOMA in dieser Form erst möglich.
- Schwache Nutzer: Das zweite Signal ist physikalisch und algorithmisch benachteiligt – mehr Rauschen, höhere Fehlerempfindlichkeit, schwierigere Rekonstruktion. Das ist Systemeigenschaft von Power-Domain-NOMA mit SIC, keine Implementierungspanne allein.
Potenzial von NOMA
Trotz der Herausforderungen bietet NOMA Potenzial für künftige, dicht genutzte Funknetze:
- IoT-Netzwerke: viele Geräte parallel, oft moderate Datenraten, Interesse an effizienter Spektrumnutzung.
- Smart Cities: Sensorfelder, Verkehrs- und Infrastrukturdaten – hohe Gerätedichte, begrenzte Ressourcen.
- Energiearme Kommunikation: weniger strikte orthogonale Zuweisung kann Overhead reduzieren – verbunden mit sauberer Leistungsplanung und robusten Empfängern.
Mögliche Verbesserungen
Damit NOMA praxistauglicher wird, sind u. a. sinnvoll:
- Adaptive Leistungsregelung: Sender passen Leistung dynamisch an, damit das optimale Verhältnis stabiler bleibt.
- Machine Learning für SIC / Kanal: z. B. neurale oder iterative Schätzer für Restinterferenz und Kanal – robuster gegenüber Rauschen und Modellfehlern (Forschungs- und Prototypenstand).
- Fehlerkorrektur (FEC): reduziert Bitfehler im zweiten Nutzerpfad und entschärft SIC-Restfehler massgeblich.
- Verbesserte Synchronisation: präzisere Zeit- und Frequenzanbindung (gemeinsame Referenz, bessere Triggerung) → weniger Restfehler vor der Subtraktion.
Persönliche Engineering-Erkenntnis
Praktisch zeigt sich: Die grössten Schwierigkeiten liegen selten in der Theorie, sondern in den Details der Umsetzung.
Typische „unsichtbare“ Effekte:
- kleine Timingfehler
- minimale Phasenabweichungen
- instabile Amplituden
- nicht ideale Hardware (Offset, Drift)
Diese Details entscheiden oft, ob ein demonstratorisches System trägt oder bricht.
Schlussgedanke
NOMA verdeutlicht: Moderne drahtlose Kommunikation ist zu grossen Teilen Algorithmen- und Signalverarbeitungsfrage – nicht nur Antennen und Verstärker.
Die Kombination aus Funktechnik, Software und mathematischen Modellen eröffnet Wege, vorhandene Bandbreite effizienter zu nutzen.
Abschluss
Der beschriebene Aufbau verbindet digitale Signalverarbeitung, drahtlose Übertragung und praktische Systementwicklung und zeigt, wie theoretische Konzepte messbar werden.
Diese Verbindung aus Theorie, Implementierung und Messung ist entscheidend für die Weiterentwicklung von IoT- und Kommunikationssystemen – unabhängig davon, ob NOMA später in Standards in genau dieser Form auftaucht oder als Baustein im Methodenspektrum dient.
Autor: Ruedi von Kryentech
Erstellt am: 06.04.2026 · Zuletzt aktualisiert: 06.04.2026
Fachlicher Stand zum Zeitpunkt der letzten Aktualisierung.